
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

There is a myriad of questions with a similar problem. I've read through all of them but none seem to be similar to mine. I am using Code Composer Studio Version: 9.3.0.00012. The program is running from RAM and I am using the default linker file : 2837x_RAM_lnk_cpu1.cmd. The microcontroller is used as a part of the TMDSCNCD28379D control card. The control card is then plugged into a custom PCB board that we've developped. For now the whole system was being tested in debug mode (control card connected to PC via USB and starting the debug mode via the F11 key). The ePWM, ADC and I2C module of the micocontroller have been succesfully used till now. Below is my code which was able to run succesfully on our system in debug mode:
Here are all of the included files:
CPUTimer_Interrupts.h EPwm_Init.h
As mentioned, the code runs fine with this configuration. The next step in our application was to add CAN communication capabilties. I followed the can_loopback_bitfields.c example from C2000Ware, and the first thing I added to the existing code were global variable definitions and function declarations, as can be seen in the following section:
The error I get when debugging can be seen in the following image:
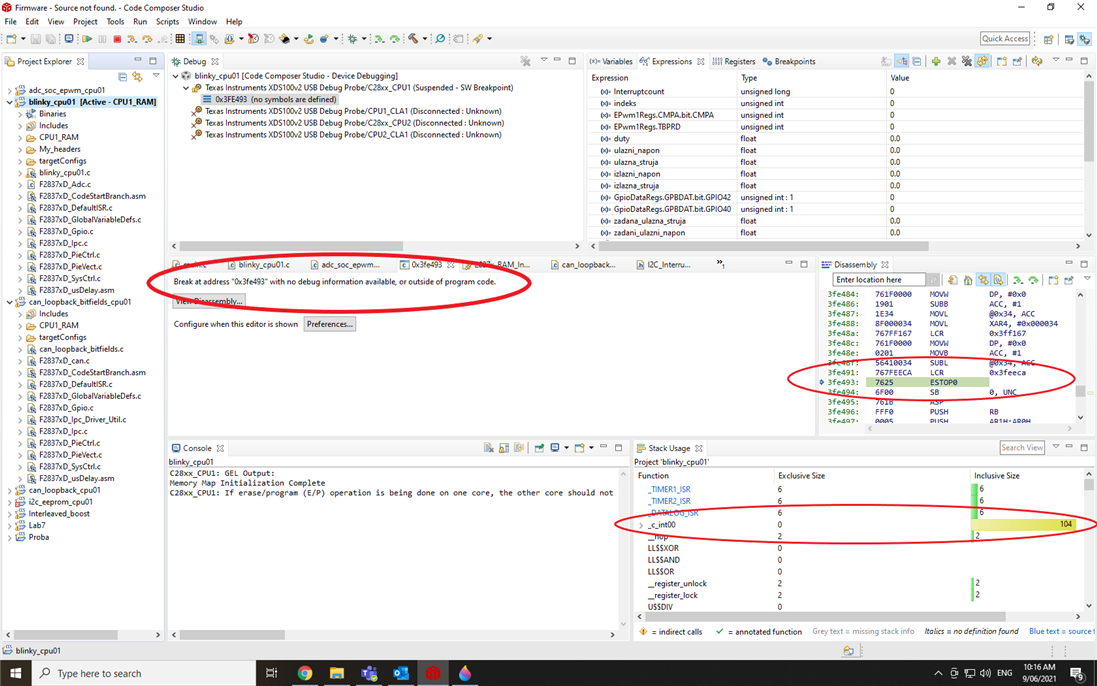
I would like to add here that the program goes through all the initialization succesfully, and also completes the I2C communciation before the infinite for (;;) loop in the main function. This for loop is used for control purposes. A few things I've observed :
1. Once the program is free running (not using Step into and step through functions), it terminates if the two variables from the infinite for(;;) loop and the "enable" variable are set to a "1". The enable variable is used for starting the regualtor inside the cpu_timer0_isr, that is to say it starts a lot of computing every control cycle. This worked fine before adding the CAN variables and function declarations.
2. If I comment and/or completely remove the CAN definitions and function declaration, the problem still persists, even though this program worked just fine before adding the CAN stuff. Tried this on a completely factory new processor. Still same issue.
3. I thought this was a stack overflow issue, so I incresed the stack size in Project Properties -> C2000 Linker -> Basic Options -> Set C system stack size -> 0x400 (the full M1 RAM as defined in the linker)
What are your suggestions for solving this issue? Do you have any general guidelines for writing code that would have prevented this (I use a lot of global variables)?



