Hi Master
i am tunning the PID Gain on the speed control base on the f2838x Example Code
runPID () function in the pdi_granddo.h
A little question is the derivation term
the follow code is original source
===============================================================================
// derivative term
in->data.d2 = in->param.Kd * (in->term.c1 * (in->term.Ref * in->param.Km - in->term.Fbk)) - in->data.d2;
in->data.ud = in->data.d2 + in->data.d1;
in->data.d1 = in->data.ud * in->term.c2;
===============================================================================
but there is a little difference with general derivative term
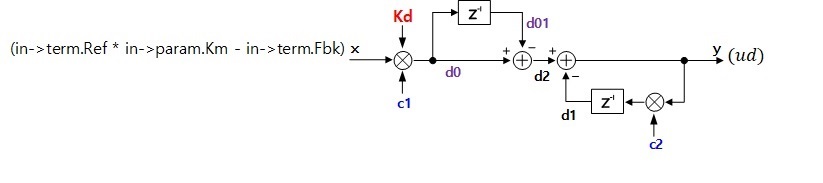
the follow figure is that I thought of the following differentiation model
so modified the code to follow
(in->data.d0, in->data.d01 is added to store the previous d0)
===============================================================================
//in->data.d2 = in->param.Kd * (in->term.c1 * (in->term.Ref * in->param.Km - in->term.Fbk)) - in->data.d2; // comment
in->data.d0 = in->param.Kd * (in->term.c1 * (in->param.Kd * (in->term.c1 * (in->term.Ref * in->param.Km - in->term.Fbk))));
in->data.d2 = in->data.d0 – in->data.d01;
In->data.d01 = in->data.d0;
in->data.ud = in->data.d2 - in->data.d1; (change d2 plus d1 to d2 minus d1) ====> ud[n]=d2[n]-c2∗ud[n-1]
in->data.d1 = in->data.ud * in->term.c2;
===============================================================================
would you tell me my opinion is correct or not ?
thank you. Master