Hi Expert,
My customer face a strange issue that there will lost some frame data when CAN transmit data in period, they send the data per 400ms in the while loop function, which will include the info of transmit times to check if any frame data is lost.
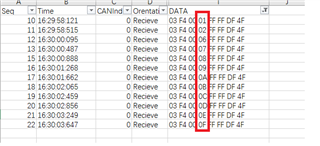
then use CAN tool to capture the data as below, they found that 3rd, 4th, 5th frame data will lost, and did not receive these data by CAN tool.
they connect the CCS for debug, but found no error in LEC register, REC and TEC is also 0, which show no error occur.
Any suggestion for this?
they have follow the guideline "Programming Examples and Debug Strategies for the DCAN Module" to debug, like use 120-Ω resistor, check correct bit time, and use low baud rate, but still did not find the reason.