



Other Parts Discussed in Thread: MOTORWARE
Hi, I have two customized boards, one using F280054F, another using F280049C.
With the same motor ,same PWM frequency of 15KHz,I can go to USER_MAX_VS_MAG_PU = 0.66 with stable max speed/max load using lab 10a by F280054F.
However , I can't run the USER_MAX_VS_MAG_PU= 0.66 smoothly using is08 by F280049C,motor vibrates a lot with high spike of phase current.But less than 0.5, the motor runs ok.
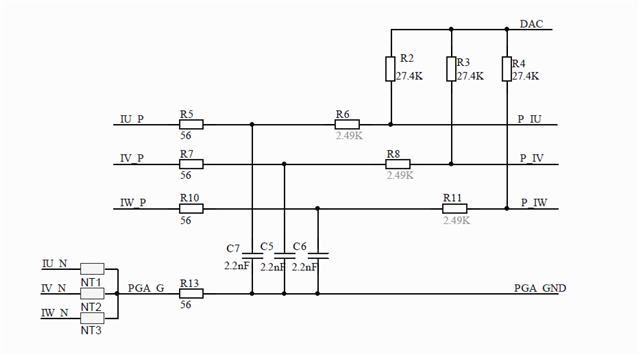
The only difference is that I use internal PGA with F280049C for current sensing, and using external op with F280054F.
I know the difference with these two MCUs, so I change the PI para. from PU to SI, to make sure these two proj/ects having the same PI para. both for speed and current loop.
Current loop bandwidth : float32_t BWc_rps = 0.25 / USER_CTRL_PERIOD_sec; (keep the same with motorware solution)
Is the current sampling problem? will the external op be good for overmodulation situation?
Any suggestion will be appreciated.
below is for current sensing circuit using low side shunt of 0.002Ω.
below is for user.h code:
//#############################################################################
// $TI Release: MotorControl SDK v3.01.00.00 $
// $Release Date: Mon Jan 11 11:23:03 CST 2021 $
// $Copyright:
// Copyright (C) 2017-2018 Texas Instruments Incorporated - http://www.ti.com/
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
#ifndef USER_H
#define USER_H
//! \file solutions/tmdshvmtrinspin/f28004x/drivers/user.h
//! \brief Contains the user related definitions
//!
// **************************************************************************
// the includes
// modules
#include "userParams.h"
//!
//!
//! \defgroup USER USER
//!
//@{
#ifdef __cplusplus
extern "C" {
#endif
// **************************************************************************
// the defines
//! \brief Defines the nominal DC bus voltage, V
//!
#define USER_NOMINAL_DC_BUS_VOLTAGE_V ((float32_t)(400.0))
//! \brief Defines the maximum voltage at the AD converter
//!
#define USER_ADC_FULL_SCALE_VOLTAGE_V ((float32_t)(592.58)) // Full scale voltage of AD converter, not the current voltage
//! \brief Defines the maximum current at the AD converter
//!
#define USER_ADC_FULL_SCALE_CURRENT_A ((float32_t)(150.0)) // High Voltage motor control kit
//! \brief Defines the analog voltage filter pole location, Hz
//!
#define USER_VOLTAGE_FILTER_POLE_Hz ((float32_t)(565.25))
/*#define USER_VOLTAGE_FILTER_POLE_Hz ((float32_t)(805.5))*/
//! \brief ADC current offsets for A, B, and C phases
#define IA_OFFSET_A (-74.0117264) // ~=0.5*USER_ADC_FULL_SCALE_CURRENT_A
#define IB_OFFSET_A (-73.5474014) // ~=0.5*USER_ADC_FULL_SCALE_CURRENT_A
#define IC_OFFSET_A (-73.7967606) // ~=0.5*USER_ADC_FULL_SCALE_CURRENT_A
//! \brief ADC voltage offsets for A, B, and C phases
#define VA_OFFSET_V (0.990514159) // ~=1.0
#define VB_OFFSET_V (0.986255884) // ~=1.0
#define VC_OFFSET_V (0.983381569) // ~=1.0
//! \brief Vbus used to calculate the voltage offsets A, B, and C
#define VBUS_OFFSET_V (0.5*USER_ADC_FULL_SCALE_VOLTAGE_V) // =0.5*USER_NOMINAL_DC_BUS_VOLTAGE_V
//! \brief Defines the maximum negative current to be applied in Id reference
//!
#define USER_MAX_NEGATIVE_ID_REF_CURRENT_A ((float32_t)(-2.0))
//! \brief Defines the number of pwm clock ticks per isr clock tick
//! Note: Valid values are 1, 2 or 3 only
#define USER_NUM_PWM_TICKS_PER_ISR_TICK (1)
//! \brief Defines the number of ISR clock ticks per current controller clock tick
//!
#define USER_NUM_ISR_TICKS_PER_CURRENT_TICK (1)
//! \brief Defines the number of ISR clock ticks per speed controller clock tick
//!
#define USER_NUM_ISR_TICKS_PER_SPEED_TICK (16)
//! \brief Defines the number of current sensors
//!
#define USER_NUM_CURRENT_SENSORS (3)
//! \brief Defines the number of voltage sensors
//!
#define USER_NUM_VOLTAGE_SENSORS (3)
//! \brief Defines the system maximum input frequency, MHz
//!
#define USER_MAXIMUM_SCALE_FREQ_Hz ((float32_t)(1000.0))
//! \brief Defines the system clock frequency, MHz
//!
#define USER_SYSTEM_FREQ_MHz ((float32_t)(100.0))
//! \brief Defines the Pulse Width Modulation (PWM) frequency, kHz
//!
//#define USER_PWM_FREQ_kHz ((float32_t)(5.0)) //5KHz PWM frequency
//#define USER_PWM_FREQ_kHz ((float32_t)(10.0)) //10KHz PWM frequency
//#define USER_PWM_FREQ_kHz ((float32_t)(12.0)) //12KHz PWM frequency
#define USER_PWM_FREQ_kHz ((float32_t)(16.0)) //15KHz PWM frequency
//#define USER_PWM_FREQ_kHz ((float32_t)(20.0)) //20KHz PWM frequency
//! \brief Defines the Pulse Width Modulation (PWM) period, usec
//!
#define USER_PWM_PERIOD_usec ((float32_t)1000.0/USER_PWM_FREQ_kHz)
//! \brief Defines the Interrupt Service Routine (ISR) frequency, Hz
//!
#define USER_ISR_FREQ_Hz (USER_PWM_FREQ_kHz * (float32_t)1000.0 / (float32_t)USER_NUM_PWM_TICKS_PER_ISR_TICK)
//! \brief Defines the Interrupt Service Routine (ISR) period, usec
//!
#define USER_ISR_PERIOD_usec (USER_PWM_PERIOD_usec * (float32_t)USER_NUM_PWM_TICKS_PER_ISR_TICK)
#ifdef _VSF_EN_
//! \brief Defines the timer frequency for estimator, kHz
//!
#define USER_EST_FREQ_kHz ((float32_t)(20.0))
//! \brief Defines the timer frequency for estimator, Hz
//!
#define USER_EST_FREQ_Hz (USER_EST_FREQ_kHz * (float32_t)1000.0)
//! \brief Defines the Interrupt Service Routine (ISR) period, usec
//!
#define USER_EST_PERIOD_usec ((float32_t)1000000.0/USER_EST_FREQ_Hz)
//! \brief Defines the timer frequency for controller, Hz
//!
#define USER_CTRL_FREQ_Hz (USER_EST_FREQ_Hz)
//! \brief Defines the controller execution period, usec
//!
#define USER_CTRL_PERIOD_usec (USER_EST_PERIOD_usec)
//! \brief Defines the controller execution period, sec
//!
#define USER_CTRL_PERIOD_sec ((float32_t)USER_CTRL_PERIOD_usec/(float32_t)1000000.0)
//! \brief Defines the timer frequency for trajectory, Hz
//!
#define USER_TRAJ_FREQ_Hz (USER_EST_FREQ_Hz)
#else
//! \brief Defines the timer frequency for estimator, kHz
//!
#define USER_EST_FREQ_Hz (USER_ISR_FREQ_Hz)
//! \brief Defines the Interrupt Service Routine (ISR) period, usec
//!
#define USER_EST_PERIOD_usec (USER_ISR_PERIOD_usec)
//! \brief Defines the timer frequency for controller, Hz
//!
#define USER_CTRL_FREQ_Hz (USER_ISR_FREQ_Hz)
//! \brief Defines the controller execution period, usec
//!
#define USER_CTRL_PERIOD_usec (USER_ISR_PERIOD_usec)
//! \brief Defines the controller execution period, sec
//!
#define USER_CTRL_PERIOD_sec ((float32_t)USER_CTRL_PERIOD_usec/(float32_t)1000000.0)
//! \brief Defines the timer frequency for trajectory, Hz
//!
#define USER_TRAJ_FREQ_Hz (USER_ISR_FREQ_Hz)
#endif // _VPF_EN_
//! \brief Defines the direct voltage (Vd) scale factor
//!
#define USER_VD_SF ((float32_t)(0.95))
//! \brief Defines the voltage scale factor for the system
//!
#define USER_VOLTAGE_SF (USER_ADC_FULL_SCALE_VOLTAGE_V / (float32_t)4096.0) // 12 bit ADC, 2^12 = 4096
#define USER_DCBUS_VOLTAGE_SF (USER_ADC_FULL_SCALE_DCBUS_VOLTAGE_V / (float32_t)4096.0) // 12 bit ADC, 2^12 = 4096
//! \brief Defines the current scale factor for the system
//!
#define USER_CURRENT_SF (USER_ADC_FULL_SCALE_CURRENT_A / (float32_t)4096.0) // 12 bit ADC, 2^12 = 4096
//! \brief Defines the pole location for the DC bus filter, rad/sec
//!
#define USER_DCBUS_POLE_rps ((float32_t)(100.0))
//! \brief Defines the pole location for the voltage and current offset estimation, rad/s
//!
#define USER_OFFSET_POLE_rps ((float32_t)(20.0))
//| \default value 100 rps
//! \brief Defines the pole location for the speed control filter, rad/sec
//!
/*#define USER_SPEED_POLE_rps ((float32_t)(100.0))*/
#define USER_SPEED_POLE_rps ((float32_t)(100.0))
//! \brief Defines the analog voltage filter pole location, rad/s
//!
#define USER_VOLTAGE_FILTER_POLE_rps (MATH_TWO_PI * USER_VOLTAGE_FILTER_POLE_Hz)
//! \brief Defines the maximum Vs magnitude in per units allowed
//! This value sets the maximum magnitude for the output of the Id and
//! Iq PI current controllers. The Id and Iq current controller outputs
//! are Vd and Vq. The relationship between Vs, Vd, and Vq is:
//! Vs = sqrt(Vd^2 + Vq^2). In this FOC controller, the Vd value is set
//! equal to USER_MAX_VS_MAG*USER_VD_MAG_FACTOR.
//! so the Vq value is set equal to sqrt(USER_MAX_VS_MAG^2 - Vd^2).
//!
//! Set USER_MAX_VS_MAG = 0.5 for a pure sinewave with a peak at
//! SQRT(3)/2 = 86.6% duty cycle. No current reconstruction
//! is needed for this scenario.
//!
//! Set USER_MAX_VS_MAG = 1/SQRT(3) = 0.5774 for a pure sinewave
//! with a peak at 100% duty cycle. Current reconstruction
//! will be needed for this scenario (Lab08).
//!
//! Set USER_MAX_VS_MAG = 2/3 = 0.6666 to create a trapezoidal
//! voltage waveform. Current reconstruction will be needed
//! for this scenario (Lab08).
//!
//! For space vector over-modulation, see lab08 for details on
//! system requirements that will allow the SVM generator to
//! go all the way to trapezoidal.
//!
//#define USER_MAX_VS_MAG_PU (0.66)
//#define USER_MAX_VS_MAG_PU (0.57)
#define USER_MAX_VS_MAG_PU (0.66)
//! \brief Defines the reference Vs magnitude in per units allowed
//! \ Set the value equal from 0.5 to 0.95 of the maximum Vs magnitude
#define USER_VS_REF_MAG_PU ((float32_t)(0.95) * USER_MAX_VS_MAG_PU)
//! \brief Defines the R/L excitation frequency, Hz
//!
#define USER_R_OVER_L_EXC_FREQ_Hz ((float32_t)(300.0))
//! \brief Defines the R/L Kp scale factor, pu
//! Kp used during R/L is USER_R_OVER_L_KP_SF * USER_NOMINAL_DC_BUS_VOLTAGE_V / USER_MOTOR_MAX_CURRENT_A;
//!
#define USER_R_OVER_L_KP_SF ((float32_t)(0.02))
//! \brief Defines maximum acceleration for the estimation speed profiles, Hz/sec
//!
#define USER_MAX_ACCEL_Hzps ((float32_t)(2.0))
//! \brief Defines the IdRated delta to use during estimation
//!
#define USER_IDRATED_DELTA_A ((float32_t)(0.0001))
//! \brief Defines the forced angle frequency, Hz
//!
#define USER_FORCE_ANGLE_FREQ_Hz ((float32_t)(3.0))
//! \brief Defines the fraction of IdRated to use during inductance estimation
//!
#define USER_IDRATED_FRACTION_FOR_L_IDENT ((float32_t)(0.5))
//! \brief Defines the fraction of SpeedMax to use during inductance estimation
//!
#define USER_SPEEDMAX_FRACTION_FOR_L_IDENT ((float32_t)(1.0))
//! \brief Defines the Power Warp gain for computing Id reference
//! If motor parameters are known, set this gain to:
//! USER_PW_GAIN = SQRT(1.0 + USER_MOTOR_Rr_Ohm / USER_MOTOR_Rs_Ohm)
//!
#define USER_PW_GAIN ((float32_t)(1.0))
//! \brief Defines the scale factor for the flux estimation
//! the default value is 1.0f, change the value between 0.1f and 1.25f
//!
#define USER_EST_FLUX_HF_SF ((float32_t)(0.125))
//! \brief Defines the scale factor for the frequency estimation
//! the default value is 1.0f, change the value between 0.5f and 1.5f
//!
#define USER_EST_FREQ_HF_SF ((float32_t)(1.5f))
//! \brief Defines the scale factor for the bemf estimation
//! the default value is 1.0f, change the value between 0.50f and 1.25f
//!
#define USER_EST_BEMF_HF_SF ((float32_t)(1.25f))
//! \brief A flag to bypass motor identification (1/0 : true/false)
//!
#define USER_BYPASS_MOTOR_ID (1) // No motor parameters identification
//#define USER_BYPASS_MOTOR_ID (0) // Do motor parameters identification
#define USER_ENABLE_MOTOR_ID 0
#define USER_DISABLE_MOTOR_ID 1
/*
//! brief Define the Kp gain for Field Weakening Control
#define USER_FWC_KP 0.05
//! brief Define the Ki gain for Field Weakening Control
#define USER_FWC_KI 0.0002
*/
/*
//! brief Define the Kp gain for Field Weakening Control
#define USER_FWC_KP 0.25
//! brief Define the Ki gain for Field Weakening Control
#define USER_FWC_KI 0.001
*/
/*
//! brief Define the Kp gain for Field Weakening Control
#define USER_FWC_KP 0.035
//! brief Define the Ki gain for Field Weakening Control
#define USER_FWC_KI 0.00075
*/
//! brief Define the Kp gain for Field Weakening Control
#define USER_FWC_KP 0.05
//! brief Define the Ki gain for Field Weakening Control
#define USER_FWC_KI 0.0002
//! \brief Defines the number of isr ticks per field weakening clock tick
//!
#define FW_NUM_ISR_TICKS_PER_CTRL_TICK (16)
//! brief Define the maximum current vector angle for Field Weakening Control
#define USER_FWC_MAX_ANGLE (float32_t)(-75.0) // degree
#define USER_FWC_MAX_ANGLE_RAD USER_FWC_MAX_ANGLE*MATH_PI/((float32_t)(180.0)) // rad
//! brief Define the minimum current vector angle for Field Weakening Control
#define USER_FWC_MIN_ANGLE (float32_t)(-30.0) // degree
#define USER_FWC_MIN_ANGLE_RAD USER_FWC_MIN_ANGLE*MATH_PI/((float32_t)(180.0)) // rad
//! brief Define the maximum current vector angle for Field Weakening Control
#define USER_FWC_MIN_CURRENT (float32_t)(-0.7 *USER_MOTOR_MAX_CURRENT_A)
#define USER_FWC_MAX_CURRENT 0
//============================================================================================
// Motor defines
//************** Motor Parameters **************
// PMSM motors
#define Estun_EMJ_04APB22_A 101
#define Estun_EMJ_04APB22_B 102
#define Marathon_N56PNRA10102 103
#define Anaheim_BLWS235D_160V 104
#define Teknic_M2310PLN04K 121
#define Anaheim_BLY172S_24V 122
#define Anaheim_BLY341S_48V 123
#define Anaheim_BLY341S_24V 124
#define Traxxas_Velineon_380 131
#define Traxxas_Velineon_3500 132
#define Pacific_Scientific 133
#define Regal_Beloit_5SME39DL0756 134
#define AutoRadiatorFan 135
#define philips_respirator 141
#define tekin_redline_4600KV 142
// ACIM motors
#define Marathon_5K33GN2A 201
#define Marathon_56H17T2011A 202
#define Dayton_3N352C 203
#define my_motor_1 301
//#define USER_MOTOR Estun_EMJ_04APB22_A
//#define USER_MOTOR Estun_EMJ_04APB22_B
//#define USER_MOTOR Marathon_N56PNRA10102
//#define USER_MOTOR Anaheim_BLWS235D_160V
//#define USER_MOTOR Teknic_M2310PLN04K
//#define USER_MOTOR Anaheim_BLY172S_24V
//#define USER_MOTOR Anaheim_BLY341S_48V
//#define USER_MOTOR Anaheim_BLY341S_24V
//#define USER_MOTOR Traxxas_Velineon_380
//#define USER_MOTOR Traxxas_Velineon_3500
//#define USER_MOTOR Pacific_Scientific
//#define USER_MOTOR Regal_Beloit_5SME39DL0756
//#define USER_MOTOR AutoRadiatorFan
//#define USER_MOTOR philips_respirator
//#define USER_MOTOR tekin_redline_4600KV
//#define USER_MOTOR Marathon_5K33GN2A
//#define USER_MOTOR Marathon_56H17T2011A
//#define USER_MOTOR Dayton_3N352C
#define USER_MOTOR my_motor_1
//#define USER_MOTOR my_motor_2
#if (USER_MOTOR == Estun_EMJ_04APB22_A)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (0.0)
#define USER_MOTOR_Rs_Ohm (2.26793718)
#define USER_MOTOR_Ls_d_H (0.00808008015)
#define USER_MOTOR_Ls_q_H (0.00808008015)
#define USER_MOTOR_RATED_FLUX_VpHz (0.387036026)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (3.82)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (2500.0)
#define USER_MOTOR_INERTIA_Kgm2 (3.10002e-05)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (30.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (200.0) // Volt
#elif (USER_MOTOR == my_motor_1)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.169607401)
#define USER_MOTOR_Ls_d_H (0.00079099607)
#define USER_MOTOR_Ls_q_H (0.00079099607)
#define USER_MOTOR_RATED_FLUX_VpHz (0.309579641)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (5.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.5)
#define USER_MOTOR_MAX_CURRENT_A (42.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (1000)
#define USER_MOTOR_INERTIA_Kgm2 (7.06154e-06)
#define USER_MOTOR_RATED_VOLTAGE_V (300.0)
#define USER_MOTOR_RATED_SPEED_KRPM (8.6)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (800.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (20.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (4.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (300.0) // Volt
#define USER_MOTOR_RATED_VOLTAGE_V (400.0)
#define USER_MOTOR_RATED_SPEED_KRPM (11.0)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (800.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (20.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (800.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (4.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (500.0) // Volt
#elif (USER_MOTOR == Estun_EMJ_04APB22_B)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (0.0)
// HV Kit with external OPA
#define USER_MOTOR_Rs_Ohm (2.98774099)
#define USER_MOTOR_Ls_d_H (0.008926632)
#define USER_MOTOR_Ls_q_H (0.008926632)
#define USER_MOTOR_RATED_FLUX_VpHz (0.445965141)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (3.82)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (2500.0)
#define USER_MOTOR_INERTIA_Kgm2 (3.10002e-05)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (20.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (200.0) // Volt
#elif (USER_MOTOR == Marathon_N56PNRA10102)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (3)
#define USER_MOTOR_Rr_Ohm (0.0)
// HV Kit with external OPA
#define USER_MOTOR_Rs_Ohm (2.17462158)
#define USER_MOTOR_Ls_H (0.0269199051)
#define USER_MOTOR_Ls_d_H (0.0218)
#define USER_MOTOR_Ls_q_H (0.0505)
#define USER_MOTOR_RATED_FLUX_VpHz (2.65306973)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (3.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-2.0)
#define USER_MOTOR_MAX_CURRENT_A (6.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (2500.0)
#define USER_MOTOR_INERTIA_Kgm2 (2.6981376e-03)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (20.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (200.0) // Volt
#elif (USER_MOTOR == Anaheim_BLWS235D_160V)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (5.3205986)
#define USER_MOTOR_Ls_d_H (0.0221263766)
#define USER_MOTOR_Ls_q_H (0.0221263766)
#define USER_MOTOR_RATED_FLUX_VpHz (0.557901621)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.5)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (5.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#define USER_MOTOR_INERTIA_Kgm2 (3.99683e-05) // 0.00566 oz-in-sec2
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (30.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (200.0) // Volt
#elif (USER_MOTOR == Teknic_M2310PLN04K)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.381334811)
#define USER_MOTOR_Ls_d_H (0.000169791776)
#define USER_MOTOR_Ls_q_H (0.000169791776)
#define USER_MOTOR_RATED_FLUX_VpHz (0.0398557819)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (2.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.5)
#define USER_MOTOR_MAX_CURRENT_A (6.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (40.0)
#define USER_MOTOR_NUM_ENC_SLOTS (1000)
#define USER_MOTOR_INERTIA_Kgm2 (7.06154e-06)
#define USER_MOTOR_RATED_VOLTAGE_V (24.0)
#define USER_MOTOR_RATED_SPEED_KRPM (3.0)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (600.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (20.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (4.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (24.0) // Volt
#elif (USER_MOTOR == Anaheim_BLY172S_24V)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.4)
#define USER_MOTOR_Ls_d_H (0.0007190173)
#define USER_MOTOR_Ls_q_H (0.0007190173)
#define USER_MOTOR_RATED_FLUX_VpHz (0.0327013217)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.5)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.5)
#define USER_MOTOR_MAX_CURRENT_A (5.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#define USER_MOTOR_INERTIA_Kgm2 (3.96154e-06)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (4.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (24.0) // Volt
#elif (USER_MOTOR == Anaheim_BLY341S_48V)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.463800967)
#define USER_MOTOR_Ls_d_H (0.00114538975)
#define USER_MOTOR_Ls_q_H (0.00114538975)
#define USER_MOTOR_RATED_FLUX_VpHz (0.0978558362)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (2.5)
#define USER_MOTOR_IND_EST_CURRENT_A (-2.0)
#define USER_MOTOR_MAX_CURRENT_A (20.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (4.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (24.0) // Volt
#elif (USER_MOTOR == Anaheim_BLY341S_24V)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.4110007)
#define USER_MOTOR_Ls_d_H (0.0007092811)
#define USER_MOTOR_Ls_q_H (0.0007092811)
#define USER_MOTOR_RATED_FLUX_VpHz (0.03279636)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.5)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (10.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (4.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (24.0) // Volt
#elif (USER_MOTOR == Traxxas_Velineon_380)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (1)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (TBD)
#define USER_MOTOR_Ls_d_H (TBD)
#define USER_MOTOR_Ls_q_H (TBD)
#define USER_MOTOR_RATED_FLUX_VpHz (TBD)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (4.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-0.5)
#define USER_MOTOR_MAX_CURRENT_A (10.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == Traxxas_Velineon_3500)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (1)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.01822988)
#define USER_MOTOR_Ls_d_H (8.322238e-06)
#define USER_MOTOR_Ls_q_H (8.322238e-06)
#define USER_MOTOR_RATED_FLUX_VpHz (0.010249538)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (2.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-2.0)
#define USER_MOTOR_MAX_CURRENT_A (5.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (40.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == Pacific_Scientific)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (0.0)
#define USER_MOTOR_Rs_Ohm (0.9428042)
#define USER_MOTOR_Ls_d_H (0.002196057)
#define USER_MOTOR_Ls_q_H (0.002196057)
#define USER_MOTOR_RATED_FLUX_VpHz (0.3481677)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (8.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == Regal_Beloit_5SME39DL0756)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (3)
#define USER_MOTOR_Rr_Ohm (0.0)
#define USER_MOTOR_Rs_Ohm (4.581007)
#define USER_MOTOR_Ls_d_H (0.03727356)
#define USER_MOTOR_Ls_q_H (0.03727356)
#define USER_MOTOR_RATED_FLUX_VpHz (0.6589699)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (2.6)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (20.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == AutoRadiatorFan)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (4)
#define USER_MOTOR_Rr_Ohm (0.0)
#define USER_MOTOR_Rs_Ohm (0.0)
#define USER_MOTOR_Ls_d_H (0.0)
#define USER_MOTOR_Ls_q_H (0.0)
#define USER_MOTOR_RATED_FLUX_VpHz (TBD)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (10.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (50.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == philips_respirator)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (1)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.1690236)
#define USER_MOTOR_Ls_d_H (0.0001557156)
#define USER_MOTOR_Ls_q_H (0.0001557156)
#define USER_MOTOR_RATED_FLUX_VpHz (0.011538831)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-1.0)
#define USER_MOTOR_MAX_CURRENT_A (5.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (40.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == tekin_redline_4600KV)
#define USER_MOTOR_TYPE MOTOR_TYPE_PM
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (0.0181193)
#define USER_MOTOR_Ls_d_H (8.180002e-06)
#define USER_MOTOR_Ls_q_H (8.180002e-06)
#define USER_MOTOR_RATED_FLUX_VpHz (0.0041173688)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (3.0)
#define USER_MOTOR_IND_EST_CURRENT_A (-3.0)
#define USER_MOTOR_MAX_CURRENT_A (5.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (60.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == Marathon_5K33GN2A)
#define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr_Ohm (5.508003)
#define USER_MOTOR_Rs_Ohm (10.71121)
#define USER_MOTOR_Ls_d_H (0.05296588)
#define USER_MOTOR_Ls_q_H (0.05296588)
#define USER_MOTOR_RATED_FLUX_VpHz (0.8165*220.0/60.0)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (1.378)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (NULL)
#define USER_MOTOR_MAX_CURRENT_A (3.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#define USER_MOTOR_INERTIA_Kgm2 (2.12002e-05)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (400.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (200.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (20.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (200.0) // Volt
#elif (USER_MOTOR == Marathon_56H17T2011A)
#define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr_Ohm (5.159403)
#define USER_MOTOR_Rs_Ohm (7.924815)
#define USER_MOTOR_Ls_d_H (0.03904648)
#define USER_MOTOR_Ls_q_H (0.03904648)
#define USER_MOTOR_RATED_FLUX_VpHz (0.8165*220.0/60.0)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (0.9941965)
#define USER_MOTOR_RES_EST_CURRENT_A (0.5)
#define USER_MOTOR_IND_EST_CURRENT_A (NULL)
#define USER_MOTOR_MAX_CURRENT_A (2.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == Dayton_3N352C)
#define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr_Ohm (2.428799)
#define USER_MOTOR_Rs_Ohm (2.863202)
#define USER_MOTOR_Ls_d_H (0.02391323)
#define USER_MOTOR_Ls_q_H (0.02391323)
#define USER_MOTOR_RATED_FLUX_VpHz (0.8165*230.0/60.0)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (1.0)
#define USER_MOTOR_IND_EST_CURRENT_A (NULL)
#define USER_MOTOR_MAX_CURRENT_A (3.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0)
#define USER_MOTOR_NUM_ENC_SLOTS (NULL)
#elif (USER_MOTOR == my_motor_2)
#define USER_MOTOR_TYPE MOTOR_TYPE_INDUCTION
#define USER_MOTOR_NUM_POLE_PAIRS (2)
#define USER_MOTOR_Rr_Ohm (NULL)
#define USER_MOTOR_Rs_Ohm (NULL)
#define USER_MOTOR_Ls_d_H (NULL)
#define USER_MOTOR_Ls_q_H (NULL)
#define USER_MOTOR_RATED_FLUX_VpHz (0.8165*230.0/60.0)
#define USER_MOTOR_MAGNETIZING_CURRENT_A (NULL)
#define USER_MOTOR_RES_EST_CURRENT_A (0.5)
#define USER_MOTOR_IND_EST_CURRENT_A (NULL)
#define USER_MOTOR_MAX_CURRENT_A (5.0)
#define USER_MOTOR_FLUX_EXC_FREQ_Hz (5.0)
// Number of lines on the motor's quadrature encoder
#define USER_MOTOR_NUM_ENC_SLOTS (1000)
#define USER_MOTOR_FREQ_MIN_HZ (5.0) // Hz
#define USER_MOTOR_FREQ_MAX_HZ (300.0) // Hz
#define USER_MOTOR_FREQ_LOW_HZ (10.0) // Hz
#define USER_MOTOR_FREQ_HIGH_HZ (400.0) // Hz
#define USER_MOTOR_VOLT_MIN_V (4.0) // Volt
#define USER_MOTOR_VOLT_MAX_V (24.0) // Volt
#else
#error No motor type specified
#endif
//! \brief Defines the maximum current slope for Id trajectory
//!
#define USER_MAX_CURRENT_DELTA_A (USER_MOTOR_RES_EST_CURRENT_A / USER_ISR_FREQ_Hz)
//! \brief Defines the maximum current slope for Id trajectory during power warp mode
//!
#define USER_MAX_CURRENT_DELTA_PW_A (0.3 * USER_MOTOR_RES_EST_CURRENT_A / USER_ISR_FREQ_Hz)
#ifndef USER_MOTOR
#error Motor type is not defined in user.h
#endif
#ifndef USER_MOTOR_TYPE
#error The motor type is not defined in user.h
#endif
#ifndef USER_MOTOR_NUM_POLE_PAIRS
#error Number of motor pole pairs is not defined in user.h
#endif
#ifndef USER_MOTOR_Rr_Ohm
#error The rotor resistance is not defined in user.h
#endif
#ifndef USER_MOTOR_Rs_Ohm
#error The stator resistance is not defined in user.h
#endif
#ifndef USER_MOTOR_Ls_d_H
#error The direct stator inductance is not defined in user.h
#endif
#ifndef USER_MOTOR_Ls_q_H
#error The quadrature stator inductance is not defined in user.h
#endif
#ifndef USER_MOTOR_RATED_FLUX_VpHz
#error The rated flux of motor is not defined in user.h
#endif
#ifndef USER_MOTOR_MAGNETIZING_CURRENT_A
#error The magnetizing current is not defined in user.h
#endif
#ifndef USER_MOTOR_RES_EST_CURRENT_A
#error The resistance estimation current is not defined in user.h
#endif
#ifndef USER_MOTOR_IND_EST_CURRENT_A
#error The inductance estimation current is not defined in user.h
#endif
#ifndef USER_MOTOR_MAX_CURRENT_A
#error The maximum current is not defined in user.h
#endif
#ifndef USER_MOTOR_FLUX_EXC_FREQ_Hz
#error The flux excitation frequency is not defined in user.h
#endif
#if ((USER_NUM_CURRENT_SENSORS < 2) || (USER_NUM_CURRENT_SENSORS > 3))
#error The number of current sensors must be 2 or 3
#endif
#if (USER_NUM_VOLTAGE_SENSORS != 3)
#error The number of voltage sensors must be 3
#endif
// **************************************************************************
// the typedefs
// **************************************************************************
// the globals
// **************************************************************************
// the functions
//! \brief Sets the user parameter values
//! \param[in] pUserParams The pointer to the user param structure
extern void USER_setParams(USER_Params *pUserParams);
//! \brief Sets the private user parameter values
//! \param[in] pUserParams The pointer to the user param structure
extern void USER_setParams_priv(USER_Params *pUserParams);
//! \brief Sets the private user parameter values
//! \param[in] pUserParams The pointer to the user param structure
extern void cla_USER_setParams_priv(USER_Params *pUserParams);
#ifdef __cplusplus
}
#endif // extern "C"
//@} // ingroup
#endif // end of USER_H definition
