Other Parts Discussed in Thread: C2000WARE
Hi Team,
Can you please help with the inquiry below?
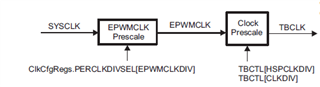
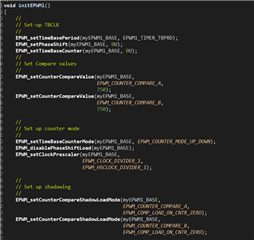
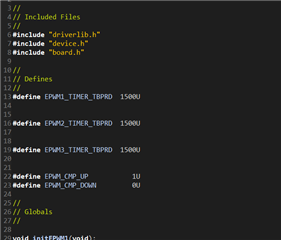
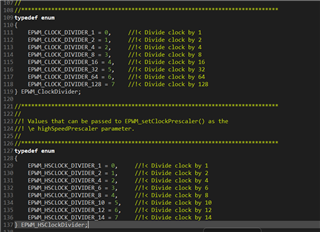
I was trying to generate PWM signals using the ePWM module in the launchpad using the example code in C2000ware. I was able to generate the PWM signals however the frequency of the PWM comes out to be the half of what I calculated, I have already searched the E2E forum and could not find a satisfactory solution. I have checked the code as well and I don't think I am missing anything but I'll still attach some screenshots of my code.
The TBPRD value I defined is 1500 so as to get a duty cycle of 50%, according to me the frequency should be 33.33 kHz but it is coming out to be 16.67 kHz.

Let me know if you need more information.
Regards,
Marvin