Other Parts Discussed in Thread: MOTORWARE
D:\ti\motorware\motorware_1_01_00_18\sw\solutions\instaspin_foc\boards\boostxldrv8305_revA\f28x\f2802xF\projects\ccs\proj_lab10a
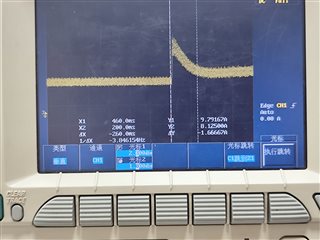
Hello, I used the above routine to drive a motor with a load and found that when responding to the same command speed at the same speed, it would be about 100ms slower than competitors. I would like to ask what other parameters besides acceleration, speed loop, and current loop pi can be debugged. I tried increasing acceleration or pi, but found that it was always about 100ms slower. The bus current is as follows, and I don't feel like it is oscillating. The current waveform is on the left, and the competitor's product is on the right,Competitors also use this chip