Other Parts Discussed in Thread: SYSCONFIG, C2000WARE
Hello,
I have a big problem on a 2 cores application.
I started from the led blinking application, provided by TI.
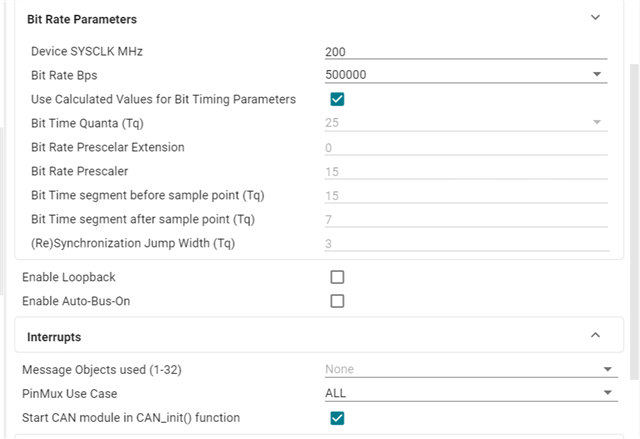
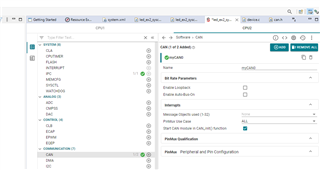
I tried to add a CAN functionnality on the second core, using SySconfig. I put the example in attached files.
When I run the project in a debug session, I noticed that the programm on the Core 2 never goes out from the Board_init() function.
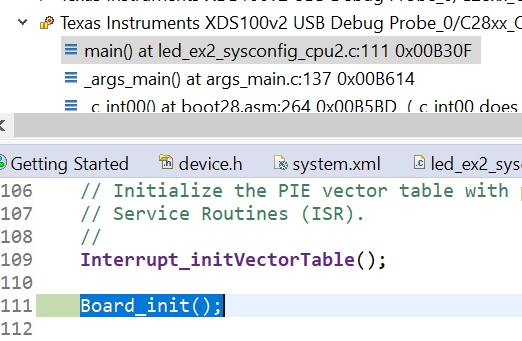
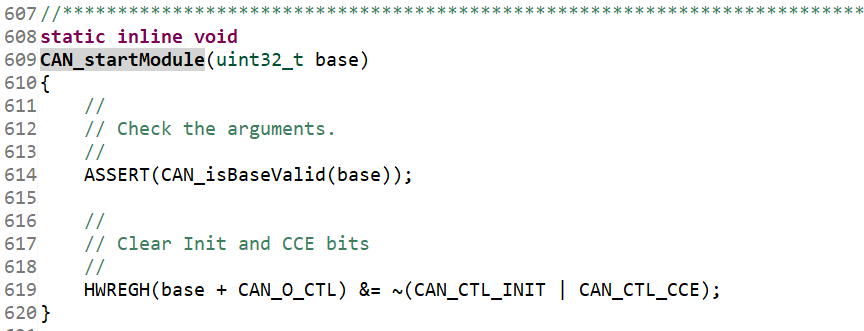
More exactly, the programm stops in the CAN_initRAM function:
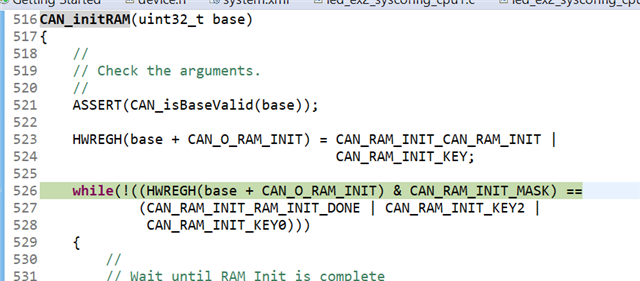
Can anyone help me ?