


Tool/software:
Hi.
I am seeking advice on how to address significant errors in Constant Current control.
Current calibration is being tested by obtaining offset and gain values using an external precision instrument.
H/W Configuration
- Topology: Buck Non-isolation DC-DC
- DSP: TMS320F28379S
- ADC: SDFM + AMC1304M05DW
- PWM: 50kHz
- Interrupt: Occurs once every 50kHz
EPwm11 Settings
EPwm11Regs.TBPRD = 1999;
EPwm11Regs.CMPC = 39;
EPwm11Regs.CMPA.bit.CMPA = 1969;
Problems
- When set to 3.000A, the error is significant, resulting in a current of about 2.913A.
- The error in the output current value changes in the CC control state depending on the output voltage (duty cycle change), even for the same current (e.g., 3A).
When the position of the Shunt Resistor was moved to the final output, CC control did not work.
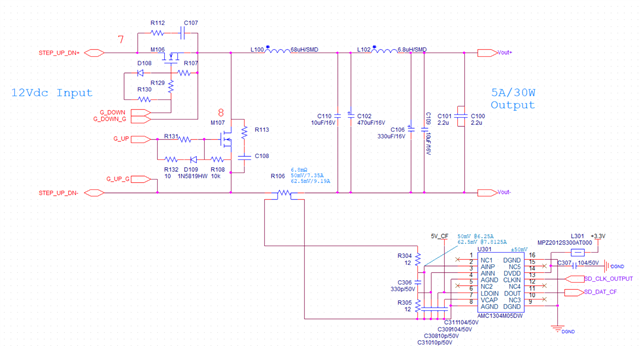
Schematic
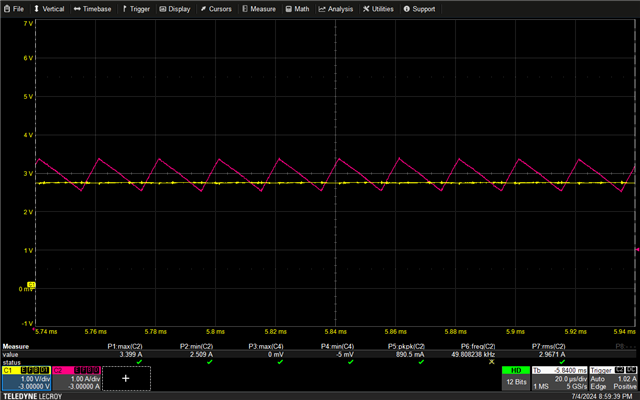
3A Inductor Current Chart
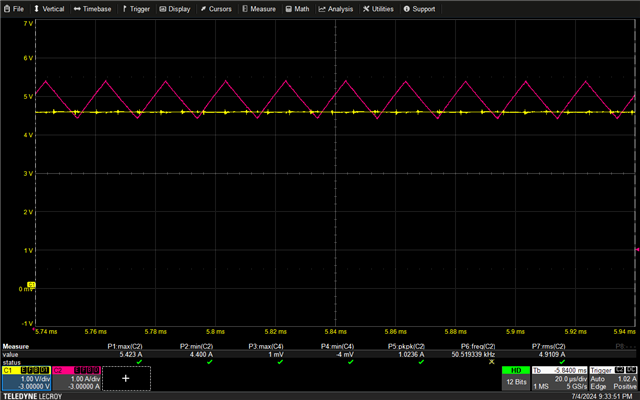
5A Inductor Current Chart
Could you advise on any methods to achieve precise CC control? Have a happy day.
