


Hello InstaSPIN community,
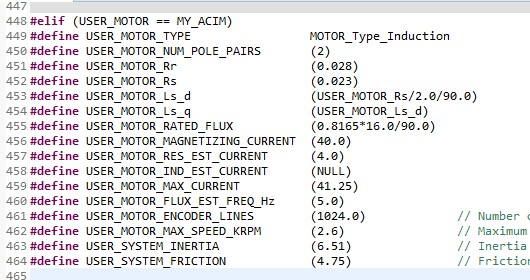
Here is my high current ACIM.
I am running the “lab12b” with DRV8301-69-KIT and making some load testing with a motor dynamometer.
First, I set “SpeedRef_krpm” to the rated speed(2.6krpm) with no load. Then I increase the torque of the shaft little by little. With the torque increasing, Iq increases little by little as well and the speed(2.6krpm) keeps steady. But when Iq increases to 30A, I put a little bit of torque increase, Iq directly jumps to the max current(41.25A). After that, if I keep increasing the torque, the speed will decline down and Iq maintains the saturation value.
I find that this situation is associated with “USER_IQ_FULL_SCALE_FREQ_Hz”. In that case, I set USER_IQ_FULL_SCALE_FREQ_Hz = 2600rpm * 4 poles /120 ≈ 100.And Iq exhibited good linearity within 0 to 30A, but suddenly jumps to the max current(41.25A) when it is just over 30A.
In another case,I set USER_IQ_FULL_SCALE_FREQ_Hz = 200. Iq exhibited good linearity within 0 to 20A, then suddenly jumps to the max current(41.25A) when it is just over 20A. It seems that Iq will lose control, jump to the max current and maintain the saturation value earlier if I set USER_IQ_FULL_SCALE_FREQ_Hz to a bigger value.
By the way, if I set “Flag_enablePowerWarp” to 0, Iq will directly jumps to the max current(41.25A) even with no load and the speed will never get the reference value. could you give me some advice?
Best regards,
Brant Zheng


