



Dear Champs,
I'm currently running SPM motor by using HVPM sensorless project, LEVEL1 and LEVEL2 are run successfully.
But in LEVEL3&LEVEL4, if setting the pi_iq.Umax equals to _IQ(0.2); iq_fdbk is always less than iq_ref. When increase the pi_iq.Umax to _IQ(0.3), the iq_fdbk is not stable.
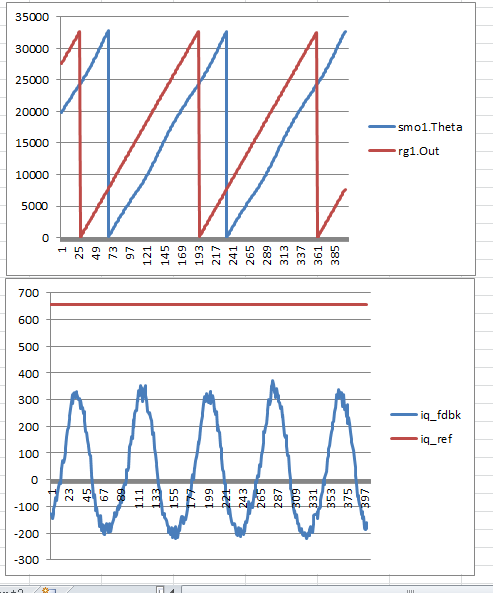
Here are the data when pi_iq.Umax = _IQ(0.2); the esmo.theta lagged behind the rg1.out, and iq_fdbk is always less than iq_ref.
Here are the data when pi_iq.Umax = _IQ(0.3), the motor get started to vibrate, and iq_fdbk is not stable.

Can you please help me on how to make the iq_fdbk get stable?

