
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


Original question:

TMS320F28034: How to make HVPM Sensorless project to support IPM motor?
Dear Champs,
I'm currently running SPM motor by using HVPM sensorless project, LEVEL1 and LEVEL2 are run successfully.
But in LEVEL3&LEVEL4, if setting the pi_iq.Umax equals to _IQ(0.2); iq_fdbk is always less than iq_ref. When increase the pi_iq.Umax to _IQ(0.3), the iq_fdbk is not stable.
Here are the data when pi_iq.Umax = _IQ(0.2); the esmo.theta lagged behind the rg1.out, and iq_fdbk is always less than iq_ref.
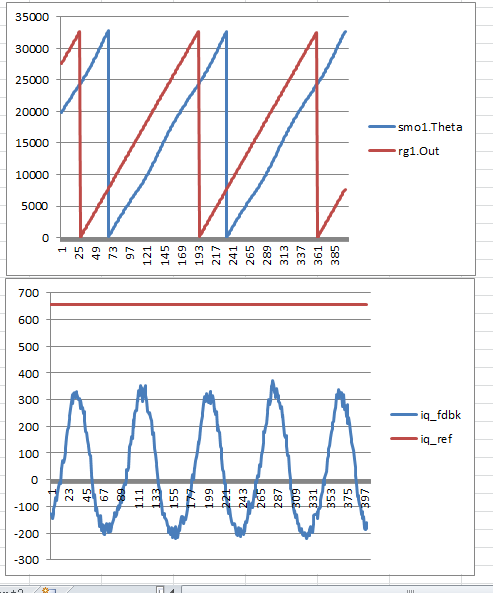
Here are the data when pi_iq.Umax = _IQ(0.3), the motor get started to vibrate, and iq_fdbk is not stable.

Can you please help me on how to make the iq_fdbk get stable?



