Other Parts Discussed in Thread: C2000WARE
Hi
My customer is debugging 280049 CAN by using driverlib.
CAN_setupMessageObject(CANA_BASE, RMP_RX_MSG_OBJ_ID, 0x800e0000,
CAN_MSG_FRAME_EXT, CAN_MSG_OBJ_TYPE_RX, 0,
CAN_MSG_OBJ_USE_EXT_FILTER, MSG_DATA_LENGTH);
CAN_setupMessageObject(CANA_BASE, RMP_TX_MSG_OBJ_ID, 0x800e0000,
CAN_MSG_FRAME_EXT, CAN_MSG_OBJ_TYPE_TX, 0,
CAN_MSG_OBJ_USE_EXT_FILTER, MSG_DATA_LENGTH);
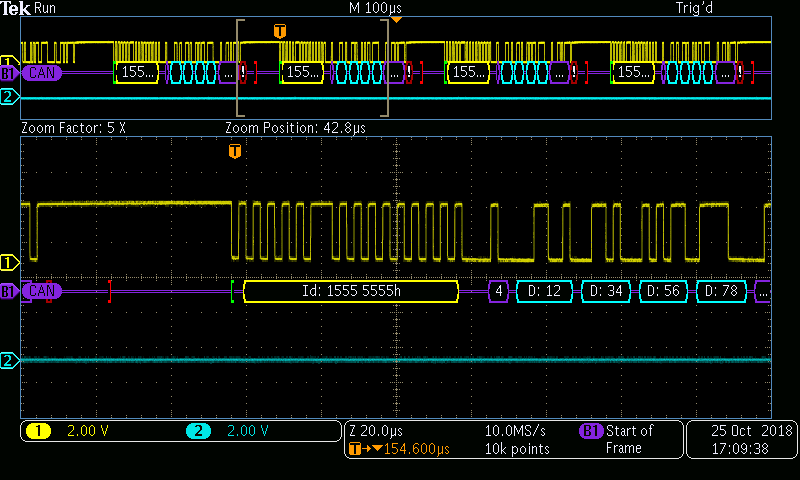
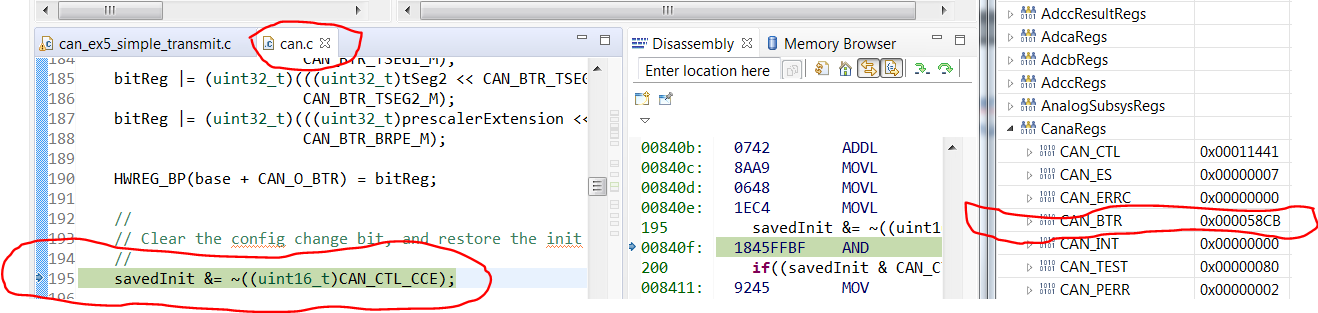
Monitor by CAN analysis meter. It can receive data now, but no data send out. CAN_ES TxOk is always 0.
Where should I pay attention? Thanks.