Part Number: TMS320F28027F
Dear champs,
I'd like to implement MTPA and FW algorithm to my code(project11a), now I have several questions about TI's docs, SPRACF3(Sensorless-FOC With Flux-Weakening and MTPA for IPMSM Motor Drives).
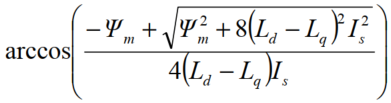
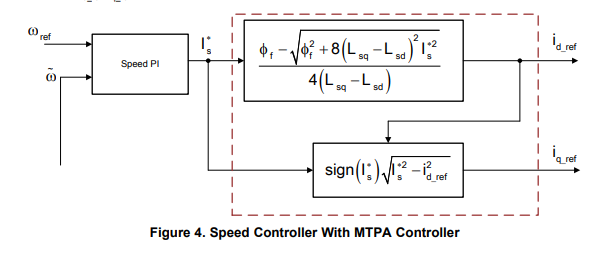
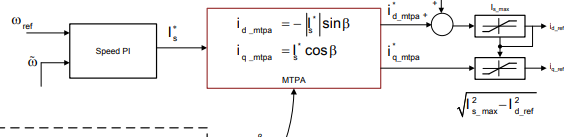
1. For Id and Iq reference, I think the important variable is the angle β, how to calculate β?
2. What is the Φf stands for?
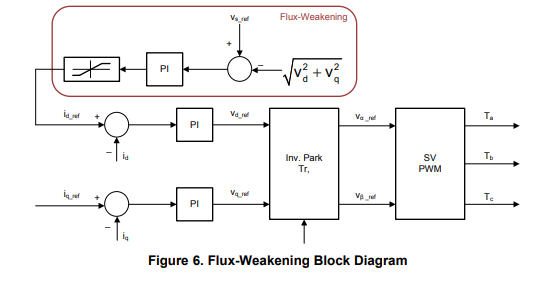
3. Field weakening diagram shows the field weakening loop is PI loop, but in the code, the output of fielding weakening just add/subtract step, it's looks like a integrity loop, can you please help explain about this?
4. Blow pictures shows the feedback of field weakening loop is sqrt(vd^2 + vq^2), but in the code, feedback = sqrt(vd^2 + vq^2)*EST_getOneOverDcBus_pu. Why?
5. Can you please help me understand EST_getOneOverDcBus_pu? Is it 1/Vbus as per unit?