Part Number: TMS320F28020
Other Parts Discussed in Thread: TCA9803, C2000WARE
I want to implement an I2C signal buffer to drive my I2C LCD.
The reason is that without the buffer, the DSP 28020 GPIO is not powerful to drive it.
You can see the waveform below. Rise time is not decent.

Code is successfully generated. 0x7C(slave address), 0x80, 0x28 are sent with a stop on the DATA wire.
After I add the I2C signal buffer chip, LCD is not properly initialized.
Because the waveform now looks like this

DSP is only able to send the first byte, 0x7C, the rest 2 bytes are missing and no stop condition is generated.
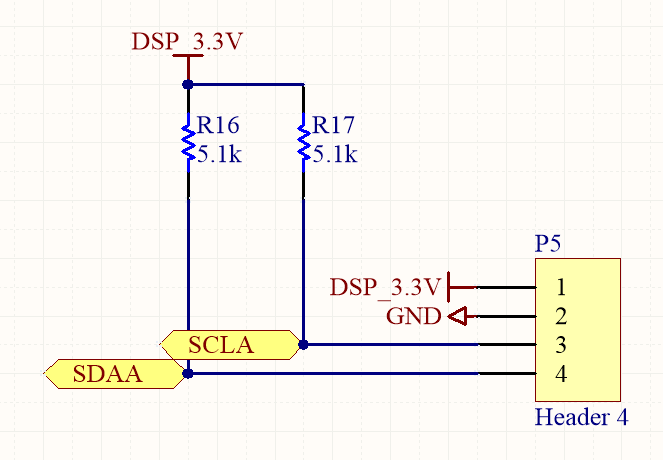
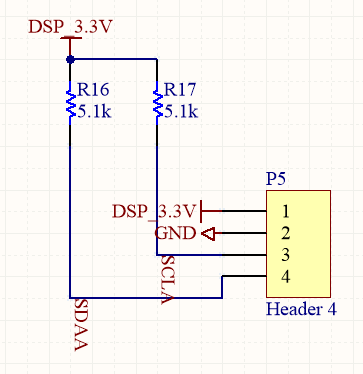
The buffer chip I use is TCA9803 from TI, and the circuit schematic is here.

I use 3.3V here. EN is directly connected to 3.3V.
I guess it is a hardware problem. Can anyone help me with this?