Part Number: TMS320F280049C
Other Parts Discussed in Thread: LAUNCHXL-F280049C, BOOSTXL-DRV8320RS, DRV8301, LAUNCHXL-F28069M, MOTORWARE, BOOSTXL-DRV8301, TPS40210, DRV8320
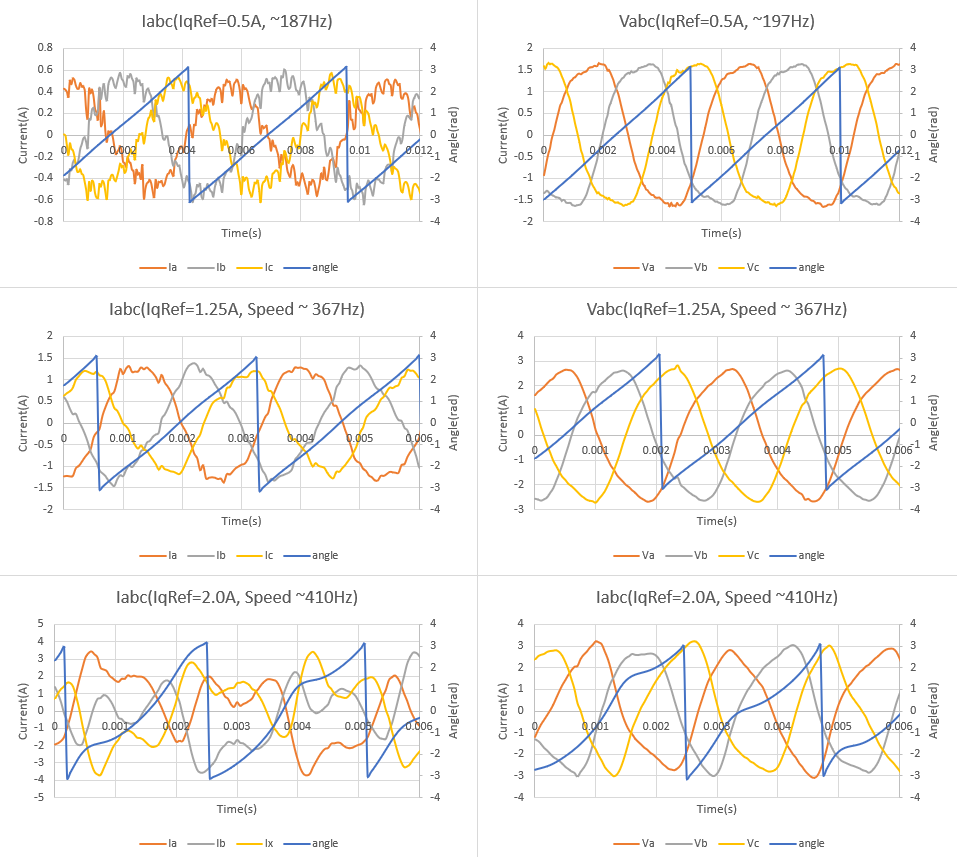
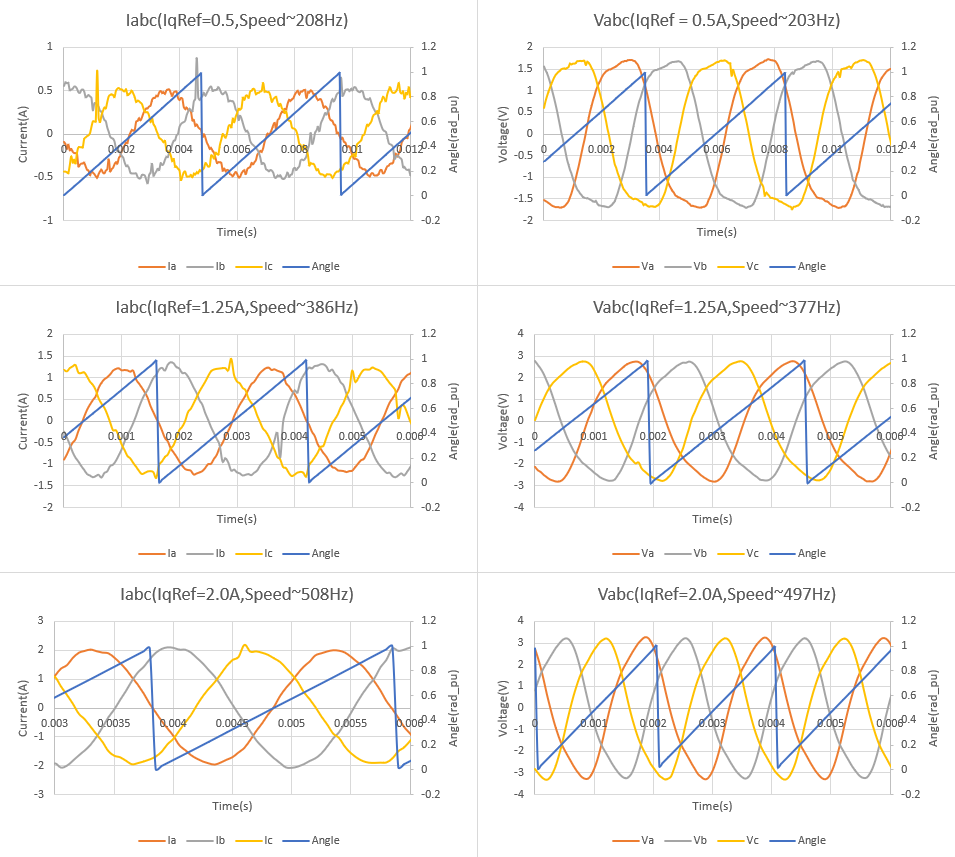
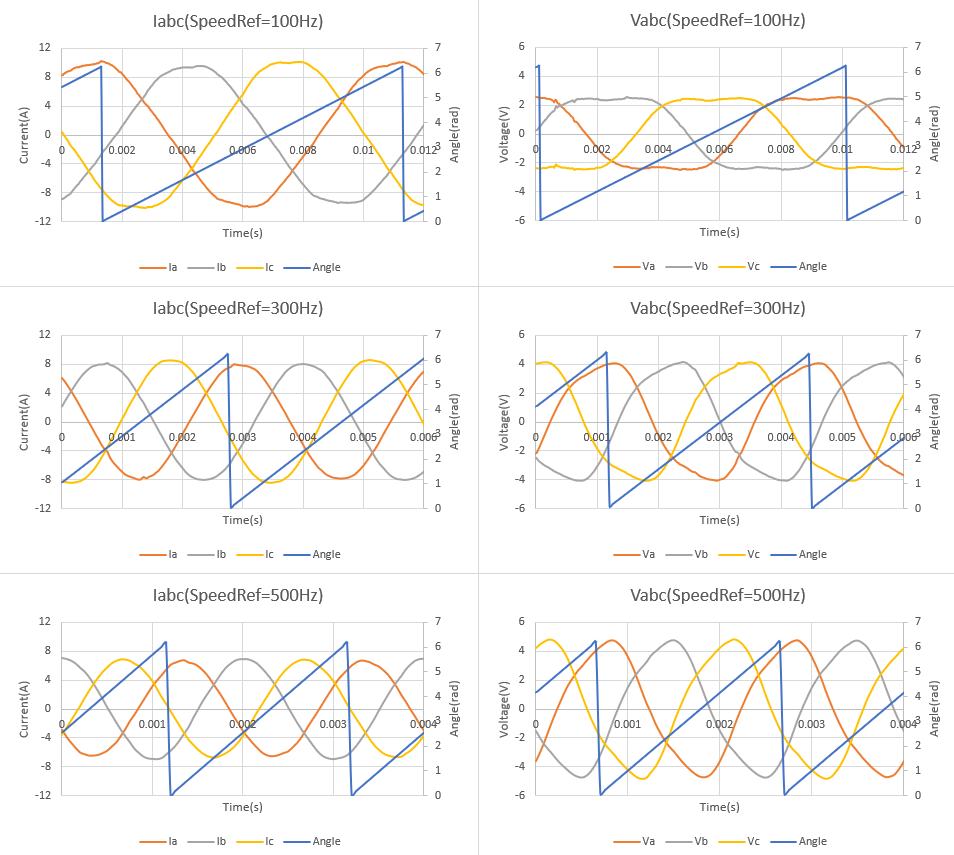
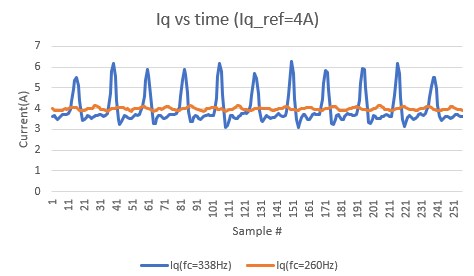
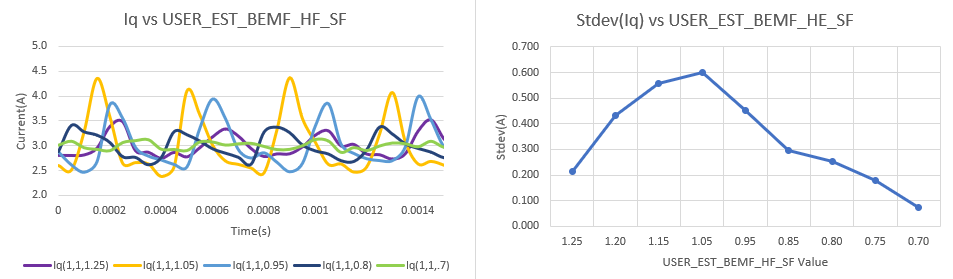
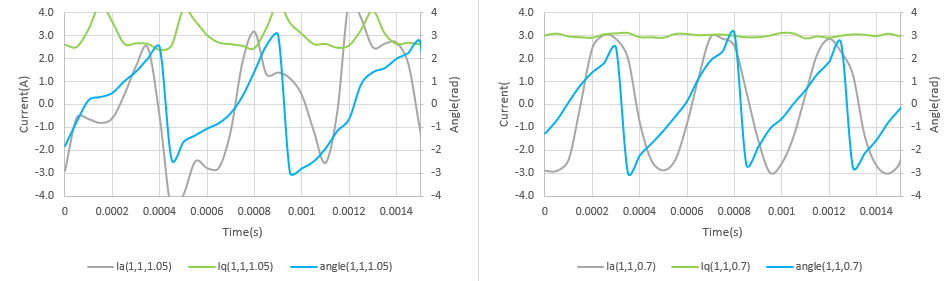
Hello - I am working with the LAUNCHXL-F280049C and BOOSTXL-DRV8320RS to drive a BLDC blower. I've worked through Labs 5, 6 and 7 and have the drive controlling the blower fairly well. I am using a 24V power supply and have speed control upto ~ 800 Hz (speed ). But I noticed when I exceed 400 Hz (speed), I start getting oscillations on the input and reference Iq currents. I also noticed that the estOutputData.angle_rad starts to get distorted. The primary effect of these oscillations is some motor noise and the speed error gets worst. Below 400Hz, the speed is locked to ~ +/- 0.1Hz; at 500Hz, the error is ~ +/- 8Hz. I have adjusted current and speed PI parameters to no avail. I have also adjusted the ADC sample window and even moved the ADC start point and did not see an improvement. So i'm looking at the estimator and having questions.
1.What does the EST_getIab_lp_A function return? I mean we feed the estimator Iab so does the estimator filter Iab and this function returns the filtered version of Iab? The function does return values but they don't appear to be the filtered version of Iab.
2. The documentation implies that EST_getIdq_lp_A does the same. But this function does not appear to work (it returns a constant 0). Is this function supposed to work? If so, what value of Iab is it using? Of does it have its own filter? If so, how are its filter constants set?
3. Is there any documentation that explains the theory behind the estimator? Something that might help me in trouble shooting this issue?
Thanks!
Brett