- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


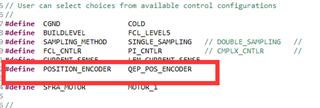
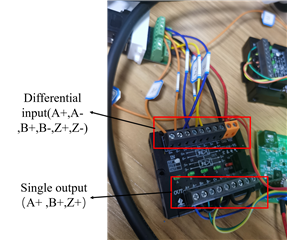
I debug the LAUNCHXL-F28379D with the BOOSTXL-3PhGaNInv , It is all TI hardware. and I use the program from E:\ccs\C2000Ware_MotorControl_SDK_3_01_00_00\solutions\boostxl_3phganinv\f2837x\ccs\sensored_foc.(LEVLE4) dual motor run with speed loop.
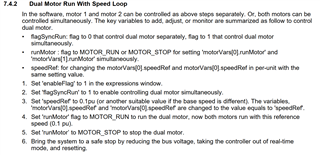
I have give the motorVars[0].speedRef 0.2pu, But motorVars[0].speed.Speed do not keep same with the Reference speed, and I give another motorVars[0].speedRef like 0.3pu, The speed of motor do not change.likely, it is always run in a steady speed.
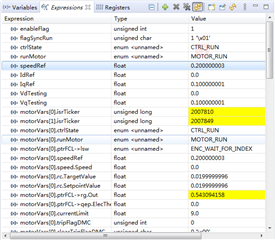
and I have checked the program when the flagSyncRun equal to 1 like below.
I have checked the variables motorVars[0].speedRef and motorVars[1].speedRef ,it both become the same with speedRef.
but it is so strange that both motor's .speed.speed do not keep same with the speedRef.
Why? so how to change the both motor's speed at level 4.