Other Parts Discussed in Thread: TMS320F28379D
Hi TI
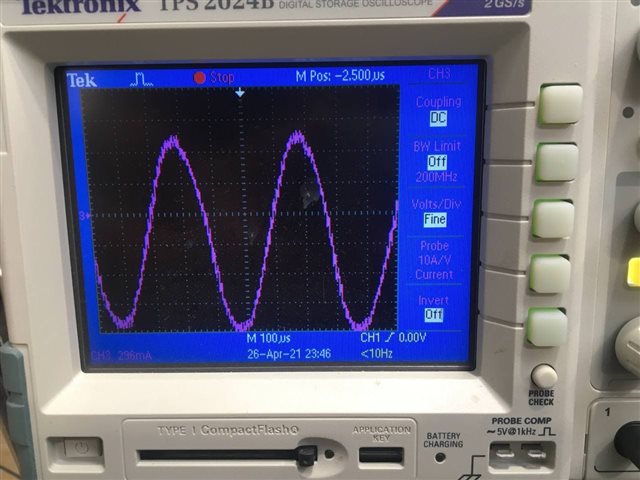
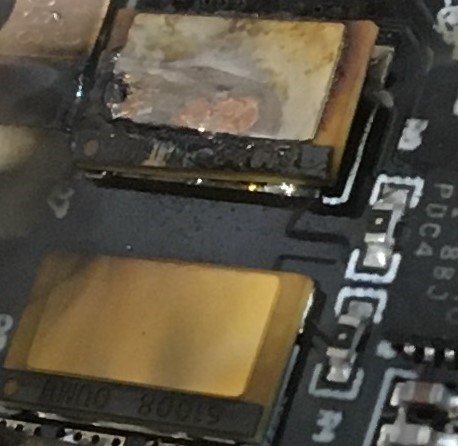
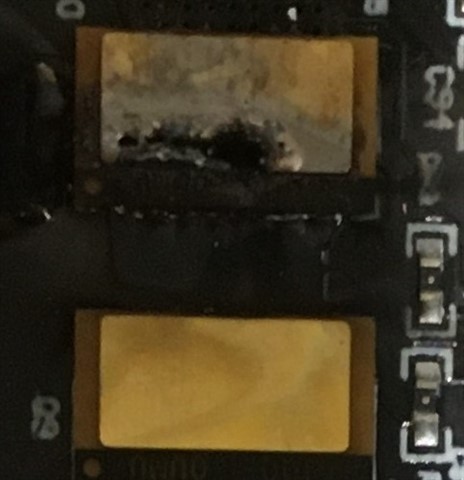
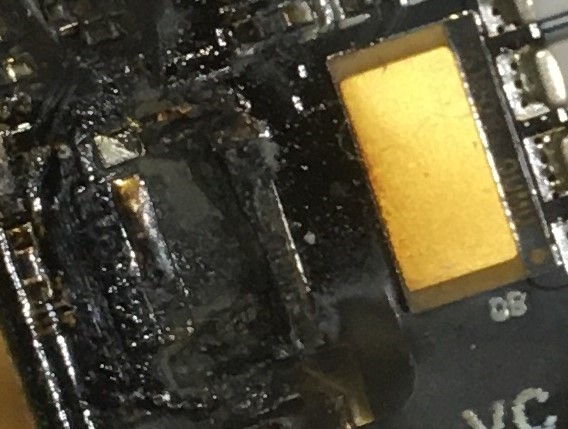
For our high speed, ultra-low inductance motor the switches burst instantly in the first pulses.
we ran a motor with inductance of 300 uH successfully but for the following one the power switches explode everytime.
The inductance is 47 uH.
#define USER_IQ_FULL_SCALE_FREQ_Hz (1400.0)
#define USER_ADC_FULL_SCALE_VOLTAGE_V (120)
#define USER_IQ_FULL_SCALE_CURRENT_A (250.0)
#define USER_ADC_FULL_SCALE_CURRENT_A (250.0)
#define USER_PWM_FREQ_kHz (100.0)
#define USER_MAX_VS_MAG_PU (0.6666)
#define USER_NUM_PWM_TICKS_PER_ISR_TICK (3)
#define USER_NUM_ISR_TICKS_PER_CTRL_TICK (1)
#define USER_NUM_CTRL_TICKS_PER_CURRENT_TICK (1)
#define USER_NUM_CTRL_TICKS_PER_EST_TICK (1)
#define USER_NUM_CTRL_TICKS_PER_SPEED_TICK (90)
#define USER_NUM_CTRL_TICKS_PER_TRAJ_TICK (90)
#define USER_R_OVER_L_EST_FREQ_Hz (300)
define USER_ZEROSPEEDLIMIT (2 / USER_IQ_FULL_SCALE_FREQ_Hz)
#define USER_VOLTAGE_FILTER_POLE_Hz (1200.0)
#define USER_MOTOR_TYPE MOTOR_Type_Pm
#define USER_MOTOR_NUM_POLE_PAIRS (1)
#define USER_MOTOR_Rr (NULL)
#define USER_MOTOR_Rs (0.02)
#define USER_MOTOR_Ls_d (0.000047)
#define USER_MOTOR_Ls_q (0.000047)
#define USER_MOTOR_RATED_FLUX (0.0148)
#define USER_MOTOR_MAGNETIZING_CURRENT (NULL)
#define USER_MOTOR_RES_EST_CURRENT (1.0)
#define USER_MOTOR_IND_EST_CURRENT (-0.5)
#define USER_MOTOR_MAX_CURRENT (100)
#define USER_MOTOR_FLUX_EST_FREQ_Hz (20.0)
Does anyone have a similar experience? What could be done to prevent this and run the motor.
Many thanks