Other Parts Discussed in Thread: MSP430FR5969, , MSP430WARE
Tool/software: Code Composer Studio
THIS IS MY MASTER CODE
/* --COPYRIGHT--,BSD
* Copyright (c) 2016, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//*****************************************************************************
//! USCI_B0, SPI 3-Wire Master Incremented Data
//! This example shows how SPI master talks to SPI slave using 3-wire mode.
//! Incrementing data is sent by the master starting at 0x01. Received data is
//! expected to be same as the previous transmission. eUSCI RX ISR is used to
//! handle communication with the CPU, normally in LPM0. If high, P1.0 indicates
//! valid data reception. Because all execution after LPM0 is in ISRs,
//! initialization waits for DCO to stabilize against ACLK.
//! ACLK = ~32.768kHz, MCLK = SMCLK = DCO ~ 1048kHz. BRCLK = SMCLK/2
//!
//! Use with SPI Slave Data Echo code example. If slave is in debug mode, P1.1
//! slave reset signal conflicts with slave's JTAG; to work around, use IAR's
//! "Release JTAG on Go" on slave device. If breakpoints are set in
//! slave RX ISR, master must stopped also to avoid overrunning slave
//! RXBUF.
//!
//! Tested on MSP430FR5969
//! -----------------
//! /|\ | |
//! | | |
//! Master---+->|RST |
//! | |
//! | P1.6|-> Data Out (UCB0SIMO)
//! | |
//! | P1.7|<- Data In (UCB0SOMI)
//! | |
//! | P2.2|-> Serial Clock Out (UCB0CLK)
//!
//!
//! This example uses the following peripherals and I/O signals. You must
//! review these and change as needed for your own board:
//! - SPI peripheral
//! - GPIO Port peripheral (for SPI pins)
//! - UCB0SIMO
//! - UCB0SOMI
//! - UCB0CLK
//!
//! This example uses the following interrupt handlers. To use this example
//! in your own application you must add these interrupt handlers to your
//! vector table.
//! - USCI_B0_VECTOR
//!
//*****************************************************************************
#include "driverlib.h"
#include <stdio.h>
volatile uint8_t RXData = 0;
volatile uint8_t TXData = 0;
volatile uint32_t i;
void main(void)
{
volatile uint16_t i;
//Stop watchdog timer
WDT_A_hold(WDT_A_BASE);
//Set P1.0 as an output pin.
/*
* Select Port 1
* Set Pin 0 as output
*/
GPIO_setAsOutputPin(
GPIO_PORT_P1,
GPIO_PIN0
);
//Set P1.0 as Output Low.
/*
* Select Port 1
* Set Pin 0 to output Low.
*/
GPIO_setOutputLowOnPin(
GPIO_PORT_P1,
GPIO_PIN0
);
// Configure Pins for LFXIN
//Set PJ.4 and PJ.5 as Primary Module Function Input.
/*
* Select Port J
* Set Pin 4, 5 to input Primary Module Function, (LFXIN).
*/
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_PJ,
GPIO_PIN4 + GPIO_PIN5,
GPIO_PRIMARY_MODULE_FUNCTION
);
//Set external frequency for XT1
CS_setExternalClockSource(32768,0);
//Set DCO frequency to max DCO setting
CS_setDCOFreq(CS_DCORSEL_0,CS_DCOFSEL_3);
//Select XT1 as the clock source for ACLK with no frequency divider
CS_initClockSignal(CS_ACLK,CS_LFXTCLK_SELECT,CS_CLOCK_DIVIDER_1);
//Start XT1 with no time out
CS_turnOnLFXT(CS_LFXT_DRIVE_0);
// Configure SPI pins
// Configure Pins for UCB0CLK
/*
* Select Port 2
* Set Pin 2 to input Secondary Module Function, (UCB0CLK).
*/
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_P5,
GPIO_PIN2,
GPIO_SECONDARY_MODULE_FUNCTION
);
// Configure Pins for UCB0TXD/UCB0SIMO, UCB0RXD/UCB0SOMI
//Set P1.6, P1.7 as Secondary Module Function Input.
/*
* Select Port 1
* Set Pin 6, 7 to input Secondary Module Function, (UCB0TXD/UCB0SIMO, UCB0RXD/UCB0SOMI).
*/
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_P5,
GPIO_PIN0 + GPIO_PIN1,
GPIO_SECONDARY_MODULE_FUNCTION
);
// Configure Pins for UCA1STE
//Set P2.3 as Secondary Module Function Input.
/*
* Select Port 2
* Set Pin 3 to input Secondary Module Function, (UCA1STE).
*/
GPIO_setAsPeripheralModuleFunctionOutputPin(
GPIO_PORT_P5,
GPIO_PIN3,
GPIO_SECONDARY_MODULE_FUNCTION
);
/*
* Disable the GPIO power-on default high-impedance mode to activate
* previously configured port settings
*/
PMM_unlockLPM5();
printf("Hello world!\n");
//Initialize Master
EUSCI_B_SPI_initMasterParam param = {0};
param.selectClockSource = EUSCI_B_SPI_CLOCKSOURCE_ACLK;
param.clockSourceFrequency = CS_getACLK();
param.desiredSpiClock = 500000;
param.msbFirst = EUSCI_B_SPI_MSB_FIRST;
param.clockPhase = EUSCI_B_SPI_PHASE_DATA_CHANGED_ONFIRST_CAPTURED_ON_NEXT;
param.clockPolarity = EUSCI_B_SPI_CLOCKPOLARITY_INACTIVITY_HIGH;
param.spiMode = EUSCI_B_SPI_4PIN_UCxSTE_ACTIVE_LOW;
EUSCI_B_SPI_initMaster(EUSCI_B1_BASE, ¶m);
// Select 4 Pin Functionality
EUSCI_B_SPI_select4PinFunctionality(EUSCI_B1_BASE,
EUSCI_B_SPI_ENABLE_SIGNAL_FOR_4WIRE_SLAVE
);
//Enable SPI module
EUSCI_B_SPI_enable(EUSCI_B1_BASE);
EUSCI_B_SPI_clearInterrupt(EUSCI_B1_BASE,
EUSCI_B_SPI_RECEIVE_INTERRUPT
);
// Enable USCI_B0 RX interrupt
EUSCI_B_SPI_enableInterrupt(EUSCI_B1_BASE,
EUSCI_B_SPI_RECEIVE_INTERRUPT);
//Wait for slave to initialize
__delay_cycles(100);
TXData = 0x1; // Holds TX data
//USCI_B0 TX buffer ready?
while(!EUSCI_B_SPI_getInterruptStatus(EUSCI_B1_BASE,
EUSCI_B_SPI_TRANSMIT_INTERRUPT))
{
;
}
//Transmit Data to slave
EUSCI_B_SPI_transmitData(EUSCI_B1_BASE, TXData);
__bis_SR_register(LPM0_bits + GIE); // CPU off, enable interrupts
__no_operation(); // Remain in LPM0
}
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=USCI_B1_VECTOR
__interrupt
#elif defined(__GNUC__)
__attribute__((interrupt(USCI_B1_VECTOR)))
#endif
void USCI_B1_ISR(void)
{
switch(__even_in_range(UCB1IV,4))
{
//Vector 2 - RXIFG
case 2:
//USCI_B0 TX buffer ready?
while(!EUSCI_B_SPI_getInterruptStatus(EUSCI_B1_BASE,
EUSCI_B_SPI_TRANSMIT_INTERRUPT))
{
;
}
RXData = EUSCI_B_SPI_receiveData(EUSCI_B1_BASE);
if (RXData==TXData)
{GPIO_toggleOutputOnPin(
GPIO_PORT_P1,
GPIO_PIN0
);
// Delay
for(i=10000; i>0; i--);}
//Increment data
TXData++;
//Send next value
EUSCI_B_SPI_transmitData(EUSCI_B1_BASE,
TXData
);
//Delay between transmissions for slave to process information
__delay_cycles(40);
break;
default: break;
}
}
THIS IS MY SLAVE CODE:
/* --COPYRIGHT--,BSD
* Copyright (c) 2016, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* --/COPYRIGHT--*/
//*****************************************************************************
//! SPI slave talks to SPI master using 3-wire mode. Data is received
//! from master and data from slave is then transmitted back to master.
//! USCI RX ISR is used to handle communication, CPU normally in LPM4.
//! Prior to initial data exchange, master pulses slaves RST for complete
//! reset.
//!
//! Use with eusci_spi_ex1_master code example. If the slave is in
//! debug mode, the reset signal from the master will conflict with slave's
//! JTAG; to work around, use IAR's "Release JTAG on Go" on slave device. If
//! breakpoints are set in slave RX ISR, master must stopped also to avoid
//! overrunning slave RXBUF.
//!
//! Tesed on MSP430FR5969
//! -----------------
//! /|\ | |
//! | | |
//! Master---+->|RST |
//! | |
//! | P1.6|-> Data Out (UCB0SIMO)
//! | |
//! | P1.7|<- Data In (UCB0SOMI)
//! | |
//! | P2.2|<- Serial Clock Out (UCB0CLK)
//!
//! This example uses the following peripherals and I/O signals. You must
//! review these and change as needed for your own board:
//! - SPI peripheral
//! - GPIO Port peripheral (for SPI pins)
//! - UCB0SIMO
//! - UCB0SOMI
//! - UCB0CLK
//!
//! This example uses the following interrupt handlers. To use this example
//! in your own application you must add these interrupt handlers to your
//! vector table.
//! - USCI_B0_VECTOR
//!
//
//*****************************************************************************
#include "driverlib.h"
#include <stdio.h>
volatile uint8_t transmitData = 0x01, receiveData = 0x00;
volatile uint32_t i;
void main(void)
{
//Stop watchdog timer
WDT_A_hold(WDT_A_BASE);
// Configure Pins for LFXIN
//Set PJ.4 and PJ.5 as Primary Module Function Input.
/*
*/
GPIO_setAsOutputPin(
GPIO_PORT_P1,
GPIO_PIN0
);
GPIO_setOutputLowOnPin(
GPIO_PORT_P1,
GPIO_PIN0
);
//
/* Select Port J
* Set Pin 4, 5 to input Primary Module Function, (LFXIN).
*/
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_PJ,
GPIO_PIN4 + GPIO_PIN5,
GPIO_PRIMARY_MODULE_FUNCTION
);
// Configure SPI pins
// Configure Pins for UCB0CLK
/*
* Select Port 2
* Set Pin 2 to input Secondary Module Function, (UCB0CLK).
*/
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_P5,
GPIO_PIN2,
GPIO_SECONDARY_MODULE_FUNCTION
);
// Configure Pins for UCB0TXD/UCB0SIMO, UCB0RXD/UCB0SOMI
//Set P2.0, P2.1 as Secondary Module Function Input.
/*
* Select Port 1
* Set Pin 6, 7 to input Secondary Module Function, (UCB0TXD/UCB0SIMO, UCB0RXD/UCB0SOMI).
*/
GPIO_setAsPeripheralModuleFunctionInputPin(
GPIO_PORT_P5,
GPIO_PIN0 + GPIO_PIN1,
GPIO_SECONDARY_MODULE_FUNCTION
);
// Configure Pins for UCA1STE
//Set P2.3 as Secondary Module Function Input.
/*
* Select Port 2
* Set Pin 3 to input Secondary Module Function, (UCA1STE).
*/
GPIO_setAsPeripheralModuleFunctionOutputPin(
GPIO_PORT_P5,
GPIO_PIN3,
GPIO_SECONDARY_MODULE_FUNCTION
);
/*
* Disable the GPIO power-on default high-impedance mode to activate
* previously configured port settings
*/
PMM_unlockLPM5();
//Initialize slave to MSB first, inactive high clock polarity and 3 wire SPI
EUSCI_B_SPI_initSlaveParam param = {0};
param.msbFirst = EUSCI_B_SPI_MSB_FIRST;
param.clockPhase = EUSCI_B_SPI_PHASE_DATA_CHANGED_ONFIRST_CAPTURED_ON_NEXT;
param.clockPolarity = EUSCI_B_SPI_CLOCKPOLARITY_INACTIVITY_HIGH;
param.spiMode = EUSCI_B_SPI_4PIN_UCxSTE_ACTIVE_LOW;
EUSCI_B_SPI_initSlave(EUSCI_B1_BASE, ¶m);
// Select 4 Pin Functionality
EUSCI_B_SPI_select4PinFunctionality(EUSCI_B1_BASE,
EUSCI_B_SPI_ENABLE_SIGNAL_FOR_4WIRE_SLAVE
);
//Enable SPI Module
EUSCI_B_SPI_enable(EUSCI_B1_BASE);
EUSCI_B_SPI_clearInterrupt(EUSCI_B1_BASE,
EUSCI_B_SPI_RECEIVE_INTERRUPT
);
//Enable Receive interrupt
EUSCI_B_SPI_enableInterrupt(EUSCI_B1_BASE,
EUSCI_B_SPI_RECEIVE_INTERRUPT
);
printf("Hello world!\n");
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0, enable interrupts
}
//******************************************************************************
//
//This is the USCI_B0 interrupt vector service routine.
//
//******************************************************************************
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector=USCI_B1_VECTOR
__interrupt
#elif defined(__GNUC__)
__attribute__((interrupt(USCI_B1_VECTOR)))
#endif
void USCI_B1_ISR(void)
{
switch(__even_in_range(UCB1IV,4))
{
//Vector 2 - RXIFG
case 2:
//USCI_B0 TX buffer ready?
while(!EUSCI_B_SPI_getInterruptStatus(EUSCI_B1_BASE,
EUSCI_B_SPI_TRANSMIT_INTERRUPT
))
{
;
}
//Transmit data to master
EUSCI_B_SPI_transmitData(EUSCI_B1_BASE,
transmitData
);
//Receive data from master
receiveData = EUSCI_B_SPI_receiveData(EUSCI_B1_BASE);
printf("Hello world!\n");
if (receiveData==transmitData)
{ GPIO_toggleOutputOnPin(
GPIO_PORT_P1,
GPIO_PIN0
);
// Delay
for(i=10000; i>0; i--);}
//Increment data to be transmitted
transmitData++;
break;
default: break;
}
}
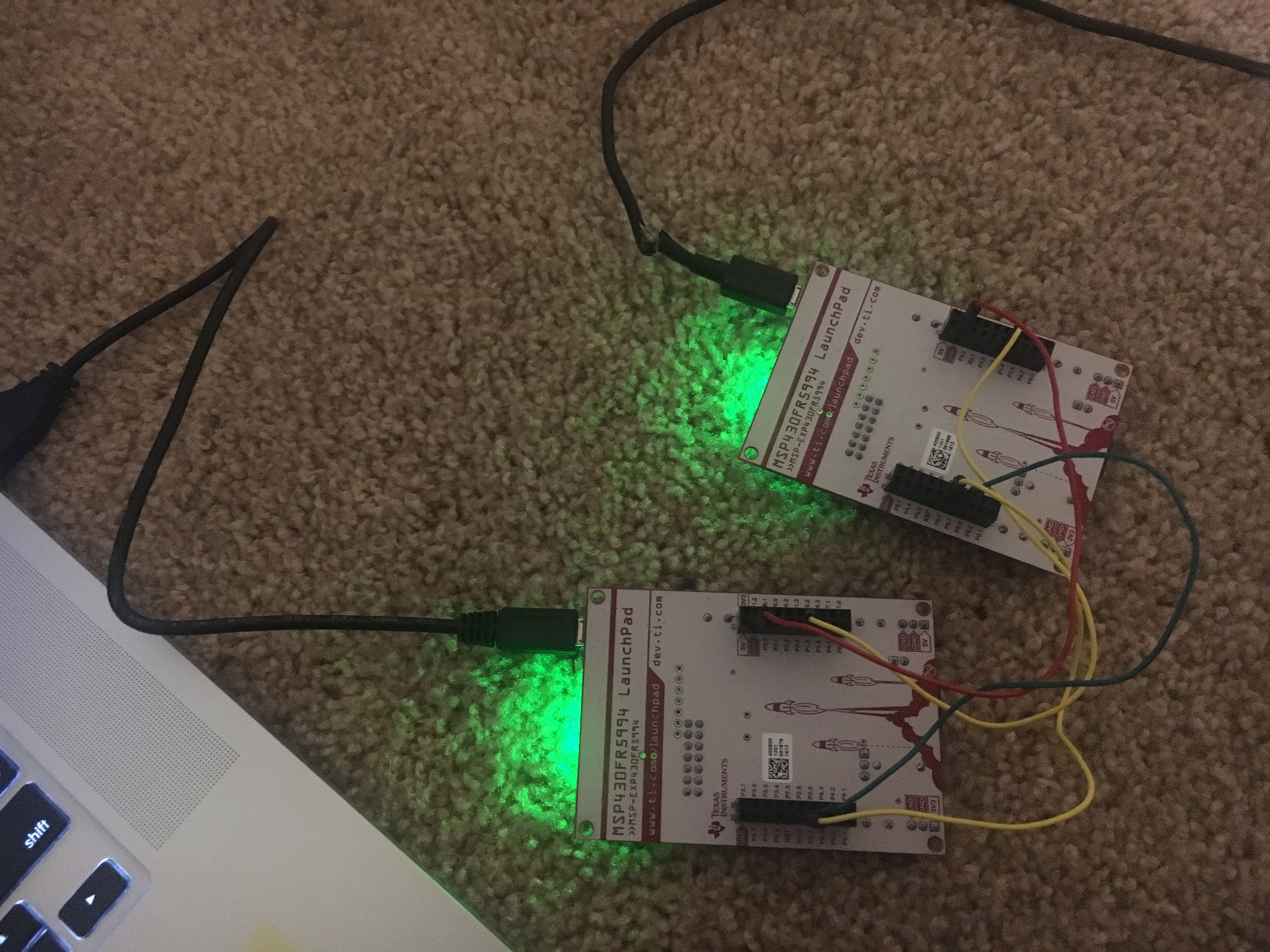
I have two MSP430FR5994 boards and I want to use SPI communication to make both boards transmit to and receive from one another. I am working with the example code provided by TI and have changed port and pin numbers in the code depending on my board.
When I run my master code on one board, the toggling of the LED happens as I increment my TXData without any connection to the slave. When I debug the slave code on the slave while it is connected to the master on which the master code is running, the slave code never enters the interrupt vector to receive the data sent by the master.
I want to use eUSCI_B1 ports for SPI so I have connected the following pins between both boards:
5V to 5V
GND to GND
P5.2 to P5.2 for UCB1CLK
P5.0 to P5.0 for UCB1SIMO
P5.1 to P5.1 for UCB1SOMI
P5.3 to P5.3 for UCB1STE
Where am I going wrong?
Thank you,
Madhu