- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Part Number: MSP432P401R
Tool/software: Code Composer Studio
Hi,
We have encountered a strange issue programming a custom board based on the 64-pin MSP432P401RIRGCR. Initial development of the firmware was completed on the 100-pin MSP432 launchpad with no issues. After receiving proto boards, we confirmed the boards were functional by programming them using CCS with a standard TI example: gpio_toggle_output_MSP_EXP432P401R_nortos_gcc
However, after we booted our custom firmware running TI-RTOS onto the proto boards, we have seemingly bricked the micro and are unable to factory reset the devices.
The sequence of steps that led to the failure were:
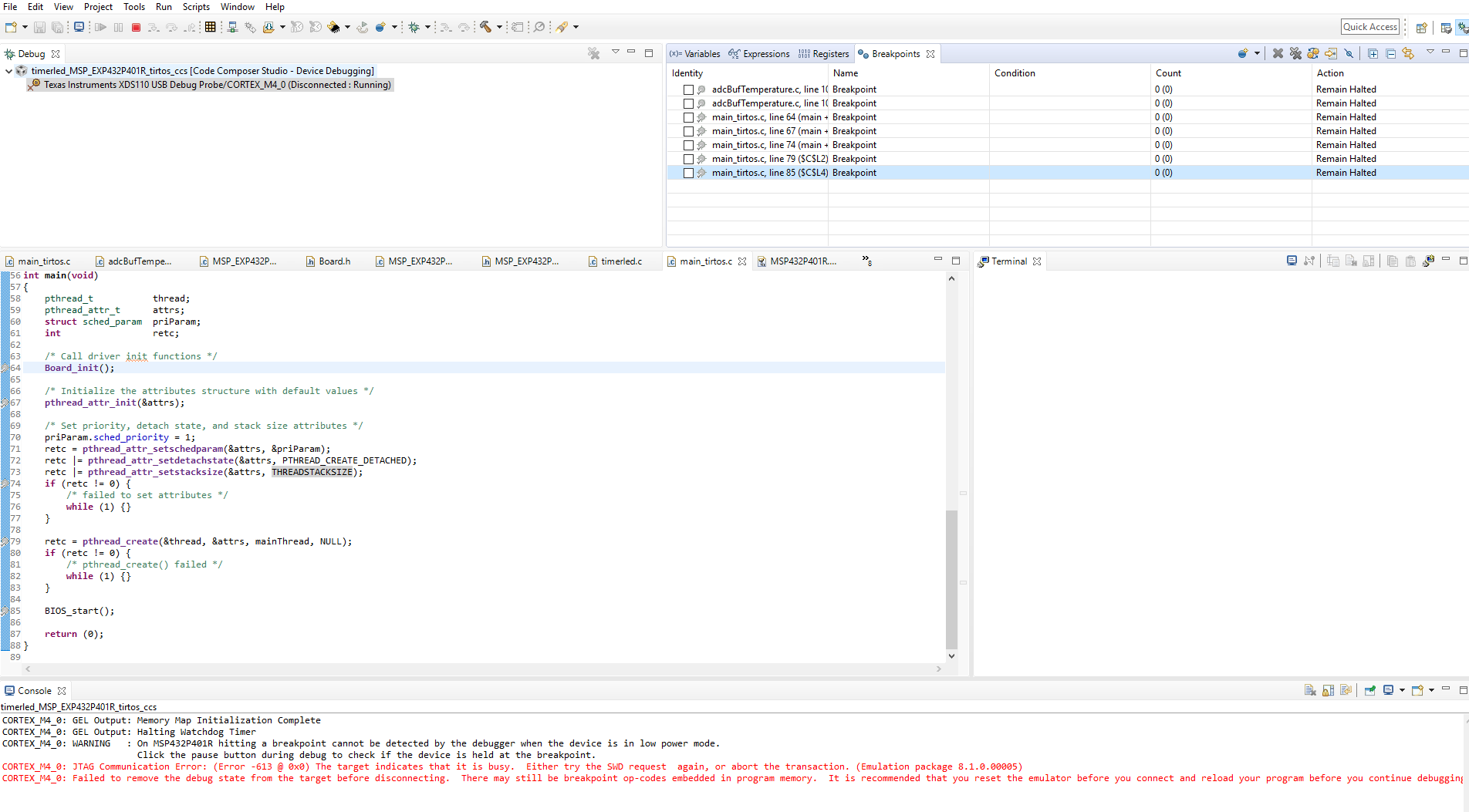
1. Custom firmware was loaded via CCS debug option
2. After successfully being programmed, standard resume / terminate options in CCS pop up as normal, indicating program is ready to run.
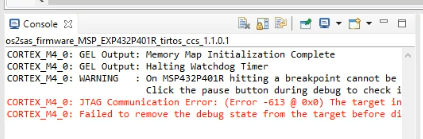
3. After selecting resume, we get the error shown below in the console after a few seconds
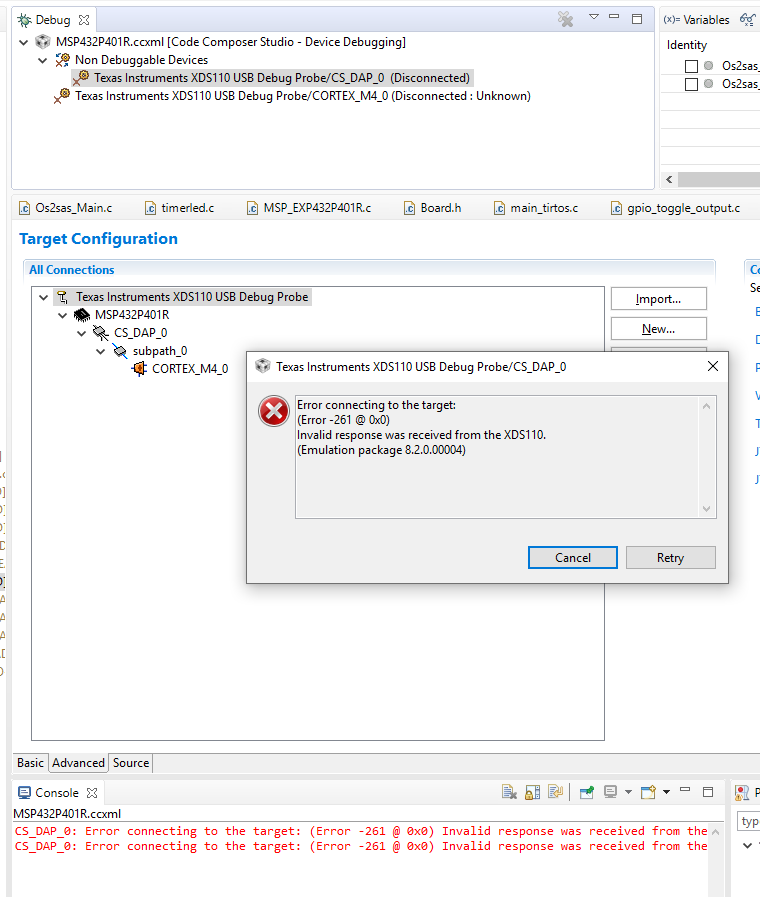
At this point the board cannot be factory reset by the standard procedure. Once you select the Target Configuration (Launch selected configuration) -> show all cores and then select "Connect", you get the following error:

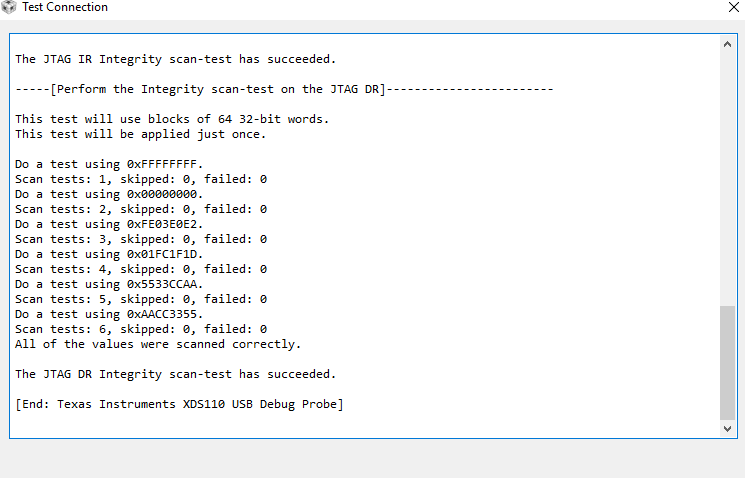
However, when you test the JTAG connection via target configuration, the JTAG integrity test succeeds which means the XDS110 still sees the MSP432.
As far as I am aware, there are no special steps required within the project to port the firmware from a 100-pin to a 64-pin MSP432. Is this correct? Both the launchpad and the MSP432P401RIRGCR have the same amount of Flash and RAM.
I have also attached our MSP_EXP432P401R.c/MSP_EXP432P401R.h files which maps the hardware on the custom board to our hardware abstracted firmware.
So far, we have encountered the same bricked board failure mode with 2 proto-boards. Our schematic is based on a previous custom designed board we made with the 100-pin micro and can be provided via IM.
Please let me know if you have any suggestions how to proceed?
Thanks,
Robert

**Attention** This is a public forum