Tool/software: Code Composer Studio
Hello,
What I thought would be a very simple task has now delayed a project by two weeks, and although I think that I have identified the problem, I would like expert advice.
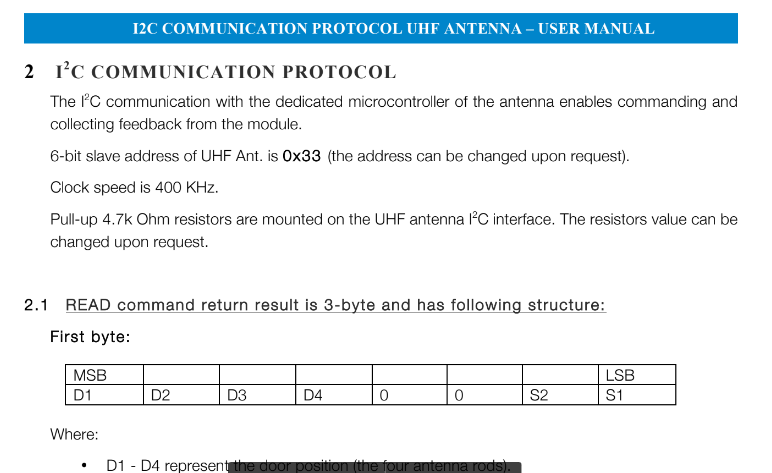
The msp430 is used for a single task when the system is starting up. It delays 30 seconds, then sends 0x1F to an i2c slave at 0x33 at 400 kHz. That's it.
I have read the clock system and i2c sections of the user manual and don't believe that I am missing anything, and have looked through the code examples [here].
I tried to stay as close to the examples as possible. My approach was as follows:
1st, I followed one of the examples, msp430fr231x_CS_01.c "Configure MCLK for 8MHz sourced from DCO." to set DCO to 2.4 kHz (although I am not sure that it wan't taken as 2 kHz)
Then I used CSCTL5 to set MCLK to 2.4 MHz and SMCLK to 400 kHz. Next I configure the I2C pins, then for testing purposed transmit 0x1F to 0x33 every 3 seconds.
I copied-and pasted the interrupt handling and the trimming function from the examples and modified a few parameters.
I have verified that the scl signal exists with an oscilloscope, but I have used an "aardvark" i2c testing device from total phase in addition to a testing tool provided by the manufacturer of the slave device, and neither actually recognizes that information is being sent. Does the code below match the task? Is there anything in the description above that suggests another mistake?
Thanks in advance,
#include <msp430.h>
void Software_Trim(); // Software Trim to get the best DCOFTRIM value
unsigned char TXData =0x1F;
unsigned char TXByteCtr;
#define MCLK_FREQ_MHZ 2.4 // MCLK = 2.4MHz
int main(void)
{
WDTCTL = WDTPW | WDTHOLD; // stop watchdog timer
__bis_SR_register(SCG0); // disable FLL
CSCTL3 |= SELREF__REFOCLK; // Set REFO as FLL reference source
CSCTL1 = DCOFTRIMEN_1 | DCOFTRIM0 | DCOFTRIM1 | DCORSEL_3;// DCOFTRIM=3, DCO Range = 2.4MHz
CSCTL2 = FLLD_0 + 243; // DCODIV = 2.4MHz
__delay_cycles(3);
__bic_SR_register(SCG0); // enable FLL
Software_Trim(); // Software Trim to get the best DCOFTRIM value
CSCTL4 = SELMS__DCOCLKDIV | SELA__REFOCLK; // set default REFO(~32768Hz) as ACLK source, ACLK = 32768Hz
// default DCODIV as MCLK and SMCLK source
CSCTL5 |= DIVM_0 | DIVS_3; // MCLK = XT1CLK = 2.4MHZ,
// SMCLK = MCLK/2 = 0.4MHz = 400 kHz
// Configure I2C Pins
P1SEL0 |= BIT2 | BIT3; //I2C pins
// Disable the GPIO power-on default high-impedance mode
// to activate previously configured port settings
PM5CTL0 &= ~LOCKLPM5;
// Configure USCI_B0 for I2C mode
UCB0CTLW0 |= UCSWRST; // put eUSCI_B in reset state
UCB0CTLW0 |= UCMODE_3 | UCMST; // I2C master mode, SMCLK
UCB0BRW = 0x8; // baudrate = SMCLK / 8
UCB0CTLW0 &=~ UCSWRST; // clear reset register
UCB0IE |= UCTXIE0 | UCNACKIE; // transmit and NACK interrupt enable
while(1){
//Delay for 3s
__delay_cycles(300000); //30000000
//Deployment Algorithm 1 for all 4 antennas
UCB0I2CSA = 0x33; // configure slave address to 0x33
TXByteCtr = 2; // Load TX byte counter
while (UCB0CTLW0 & UCTXSTP); // Ensure stop condition got sent
UCB0CTLW0 |= UCTR | UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits | GIE); // Enter LPM0 w/ interrupts
}
//return 0;
}
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector = USCI_B0_VECTOR
__interrupt void USCIB0_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_B0_VECTOR))) USCIB0_ISR (void)
#else
#error Compiler not supported!
#endif
{
switch(__even_in_range(UCB0IV, USCI_I2C_UCBIT9IFG))
{
case USCI_NONE: break; // Vector 0: No interrupts
case USCI_I2C_UCALIFG: break; // Vector 2: ALIFG
case USCI_I2C_UCNACKIFG: break; // Vector 4: NACKIFG
case USCI_I2C_UCSTTIFG: break; // Vector 6: STTIFG
case USCI_I2C_UCSTPIFG: // Vector 8: STPIFG
TXData = 0;
UCB0IFG &= ~UCSTPIFG; // Clear stop condition int flag
break;
case USCI_I2C_UCRXIFG3: break; // Vector 10: RXIFG3
case USCI_I2C_UCTXIFG3: break; // Vector 14: TXIFG3
case USCI_I2C_UCRXIFG2: break; // Vector 16: RXIFG2
case USCI_I2C_UCTXIFG2: break; // Vector 18: TXIFG2
case USCI_I2C_UCRXIFG1: break; // Vector 20: RXIFG1
case USCI_I2C_UCTXIFG1: break; // Vector 22: TXIFG1
case USCI_I2C_UCRXIFG0: break; // Vector 24: RXIFG0
case USCI_I2C_UCTXIFG0:
UCB0TXBUF = TXData++;
break; // Vector 26: TXIFG0
case USCI_I2C_UCBCNTIFG: break; // Vector 28: BCNTIFG
case USCI_I2C_UCCLTOIFG: break; // Vector 30: clock low timeout
case USCI_I2C_UCBIT9IFG: break; // Vector 32: 9th bit
default: break;
}
}
void Software_Trim()
{
unsigned int oldDcoTap = 0xffff;
unsigned int newDcoTap = 0xffff;
unsigned int newDcoDelta = 0xffff;
unsigned int bestDcoDelta = 0xffff;
unsigned int csCtl0Copy = 0;
unsigned int csCtl1Copy = 0;
unsigned int csCtl0Read = 0;
unsigned int csCtl1Read = 0;
unsigned int dcoFreqTrim = 3;
unsigned char endLoop = 0;
do
{
CSCTL0 = 0x100; // DCO Tap = 256
do
{
CSCTL7 &= ~DCOFFG; // Clear DCO fault flag
}while (CSCTL7 & DCOFFG); // Test DCO fault flag
__delay_cycles((unsigned int)3000 * MCLK_FREQ_MHZ);// Wait FLL lock status (FLLUNLOCK) to be stable
// Suggest to wait 24 cycles of divided FLL reference clock
while((CSCTL7 & (FLLUNLOCK0 | FLLUNLOCK1)) && ((CSCTL7 & DCOFFG) == 0));
csCtl0Read = CSCTL0; // Read CSCTL0
csCtl1Read = CSCTL1; // Read CSCTL1
oldDcoTap = newDcoTap; // Record DCOTAP value of last time
newDcoTap = csCtl0Read & 0x01ff; // Get DCOTAP value of this time
dcoFreqTrim = (csCtl1Read & 0x0070)>>4;// Get DCOFTRIM value
if(newDcoTap < 256) // DCOTAP < 256
{
newDcoDelta = 256 - newDcoTap; // Delta value between DCPTAP and 256
if((oldDcoTap != 0xffff) && (oldDcoTap >= 256)) // DCOTAP cross 256
endLoop = 1; // Stop while loop
else
{
dcoFreqTrim--;
CSCTL1 = (csCtl1Read & (~DCOFTRIM)) | (dcoFreqTrim<<4);
}
}
else // DCOTAP >= 256
{
newDcoDelta = newDcoTap - 256; // Delta value between DCPTAP and 256
if(oldDcoTap < 256) // DCOTAP cross 256
endLoop = 1; // Stop while loop
else
{
dcoFreqTrim++;
CSCTL1 = (csCtl1Read & (~DCOFTRIM)) | (dcoFreqTrim<<4);
}
}
if(newDcoDelta < bestDcoDelta) // Record DCOTAP closest to 256
{
csCtl0Copy = csCtl0Read;
csCtl1Copy = csCtl1Read;
bestDcoDelta = newDcoDelta;
}
}while(endLoop == 0); // Poll until endLoop == 1
CSCTL0 = csCtl0Copy; // Reload locked DCOTAP
CSCTL1 = csCtl1Copy; // Reload locked DCOFTRIM
while(CSCTL7 & (FLLUNLOCK0 | FLLUNLOCK1)); // Poll until FLL is locked
}