


Other Parts Discussed in Thread: TIDA-010056, , DRV8350R, DRV8323
Hello TI helpers,
We're using TIDA-010056 as reference code. We connected switches at P3.3 and P3.4 for left and right indicator respectively. We tried to write our own code in main loop but we show that whenever we pressed switch, execution of main code stopped and only respective indicator worked. It means motor(here we connect bulbs instead of motor for testing purpose) stops for a while and only indicators work but that we don't want it..
Here is the our code for indicators.
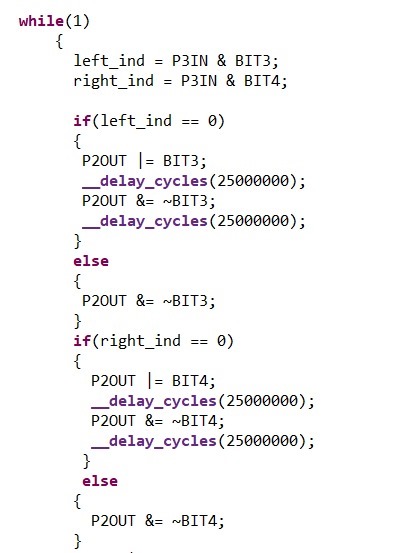 we want both code runs simultaneously... please help us it will be great help.
we want both code runs simultaneously... please help us it will be great help.
Thank you in advance.
