


Hi TI-community!
We proudly present the Delta Racing DR14-E - an electric high performance racing car for the Formula Student competition, built by students at the University of Applied Sciences in Mannheim, Germany. It was presented yesterday in our "rollout-event" together with its combustion engine (and fully aerodynamic) equipped brother DR14-C.

Some key facts of the car:
- Power: 2x 50kW nominal (rear left and right wheel driven independantly)
- Weight: 280kg
- Tubular Steel Frame with carbon fibre chassis
- Battery: LiFePO4-Battery Pack (stores 5.6kWh) and Battery Management System
- Distributed Sensor network using CAN-Bus
- WiFi Telemetry System
- Driver Information System with 4.3" Touchscreen in steering wheel



The sensor network is completely based on TI Stellaris Launchpads. We developed booster packs and use the Launchpads as robust and reliable microcontroller platform to evaluate sensor data, check plausiblitly and send/receive data via CAN. We use 4 Stellaris Launchpads in our car.
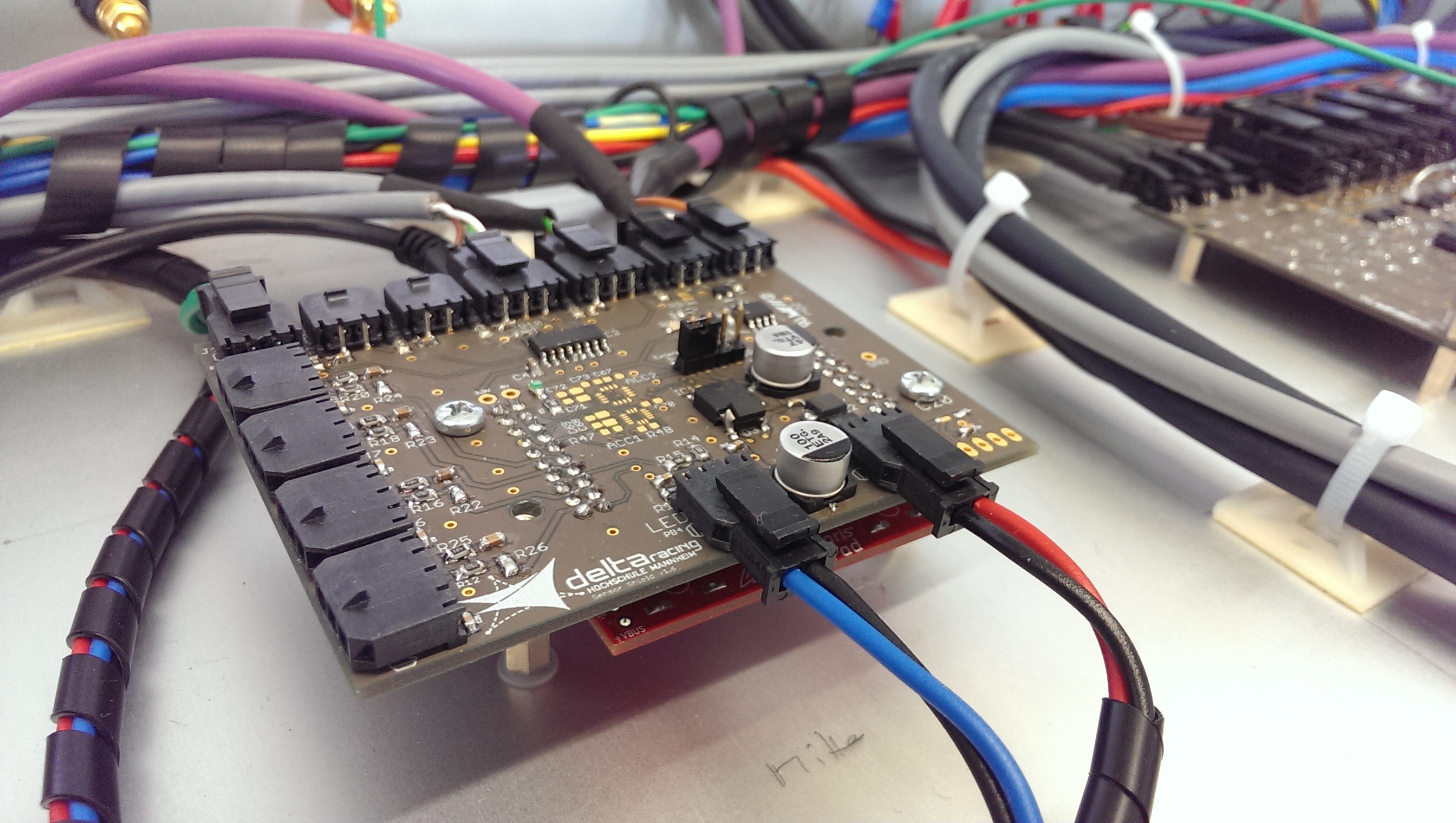
This is our sensorboard for the pedals, where torque pedal position and brake pressures plus several other values are measured, checked and transmitted via CAN. It's is also used to measure front wheel speed and control the cockpit switches and lights for the driver.
And here's our gyro board to measure the vehicle's yaw rate, also connected via CAN:

The fourth Launchpad is used as battery management master processor. It reads and monitors all 80 battery cell values from the BMS slave devices and enables cell balancing while charging.
The vehicle, electronics and software is self developed by our team and the vehicle will compete with other teams from all over the world in August at the Formula Student Event in Czech Republic.
This is what we do with TI Launchpads - and we love these little boards. Driver Library makes it easy to programm, lots of calculation power and CAN is built in - a perfect fit for our application.
Best wishes from Germany!
Moritz from Delta Racing Mannheim





