Hi Team,
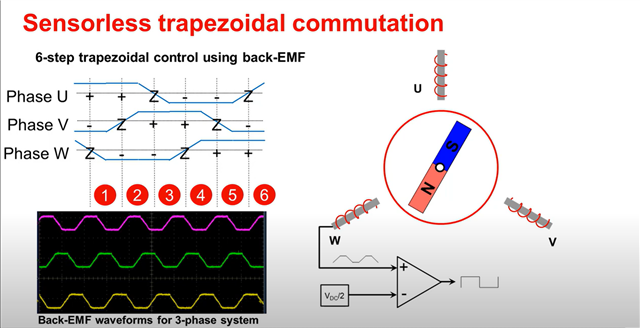
I am asking because I don't know why there is a 30 degree delay of sensorless trapezoidal communication compared to sensored one?
I inferred that is because of it's the backemf, the waveform can't react immediately, but I am not sure.
Please refer to following Youtube link, it's from TI Precision Labs - Motor Drives: Trapezoidal Commutation
As the video, the six segment of sensorless are 30 degree delay than sensored one.
The waveform of sensorless is below, it is located at top left.
https://youtu.be/xIORHY8Ii90?t=502
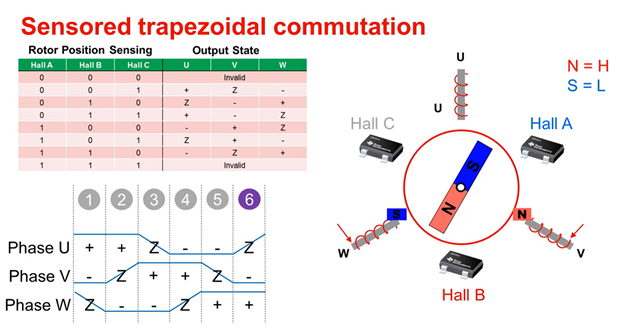
The waveform of sensored is below, it is located at bottom left.
https://youtu.be/xIORHY8Ii90?t=424