After troubleshooting the Eval board for way too long,
I have taken a DRV8350H-EVM and disconnected the included Microcontroller's control signals from the DRV8350 since I was getting MCU faults with no explanation
This is to try and get an even more basic dev board with the DRV8350H acting as a "dumb" motor driver.
I am trying to spin a motor with 5V hall sensors
I brought out the following signals to play with in 1X PWM mode:
- INHA: Connected to a function generator to produce a 5V PWM signal
- ENABLE: Connected to a 5V or GND
- INHC: To set direction
- INLC: To brake motor
I removed the 3.3V pull ups on the hall sensors ( R42, R43 and R45) and populated R46, R48 and R51
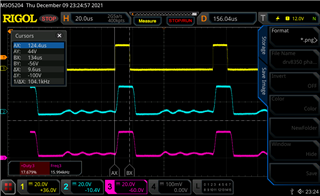
The motor can "spin" but, all phase Voltages in reference to GND are equivalent, So I believe it is just turning on and off rapidly. I Especially believe this because the motor is stuttering and not really spinning.
am not sure what i am missing
Enable and INHA work as expected. where ENABLE will start or stop the motor and the PWM signal on INHA duty cycle increases and decreases "spinning" speed.
DIR seems to do nothing, floating or pulled to 5V has the motor turn the same direction.
Below is a capture from my scope that has all 3 phases of the motor when it is "spinning"