Other Parts Discussed in Thread: MCT8316Z
Hi,
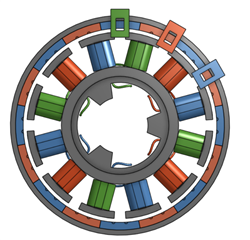
Long story short, I got a working prototype of a PCB using the MCT8316Z driver IC, with onboard motor coil and hall sensors, however I am slightly confused about which hall sensor placement are optimal.
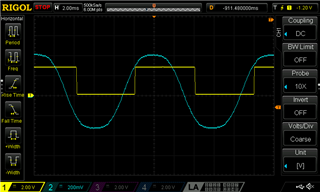
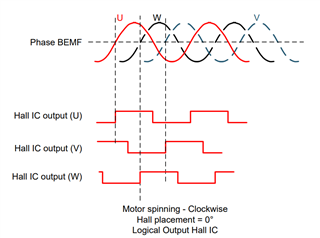
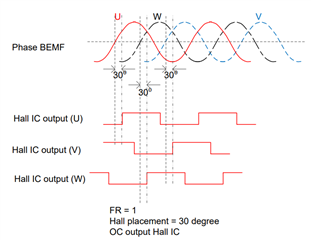
I have placed the hall sensors with a 30° phase difference between hall signal and BEMF as shown on this figure:
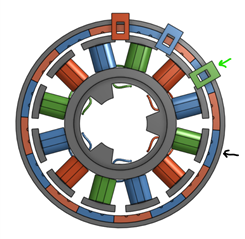
Many motor manufacturers use a 30° timing offset (why I chose it), however as this is the absolute max limit of the ADVANCE angle setting in MCT8316 I wonder if it would be better with a 0° phase difference:
Is there any difference in terms of performance or power consumption? Is there a recommended design by TI?
Kind regards,
Emil Jacobsen