Can you define when tLOCK_EN (0.7 sec) is applied during a direction change? I have read many other e2e posts about direction change delays, but have not seen a clear explanation of when this delay is added.
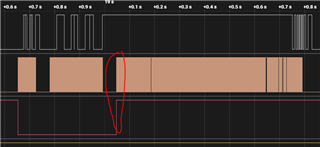
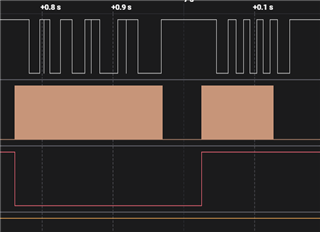
When I change direction, I set PWM to zero, wait some 10's of msec, change FR, wait a few msec, then set PWM on again. Sometimes the motor reverses immediately, but sometimes it waits 0.7 sec before running again. I can't tell what conditions cause the extra delay.
Several e2e answers explain that the DRV waits for the motor to stop before it will change commutation direction. Is there a timeout shorter than tLOCK_EN that applies for determining "stopped"?