


Brushless DC motors are widely used across market sectors and the industry is attempting to move from sensored to sensorless solutions for applications that don’t need the tight position control offered by sensored solutions.
In sensorless BLDC systems, engineers typically need reliable motor stop options to slow the motor to a stop after open loop without relying on sensors for position feedback. TI’s integrated control BLDC drivers with Field Oriented Control like MCF8316A have configurable motor stop options to allow engineers to configure how the driver behaves when the motor stop command is received.
The five configurations available in the MCF8316A are Coast (Hi-Z) Mode, Recirculation Mode, Low-Side Braking, High-Side Braking, Active Spin-Down. In this blog post we will go through how each method works, how to implement them, and some key things you need to consider when choosing a specific motor stop option.
At a glance here is the comparison between the motor stop options:
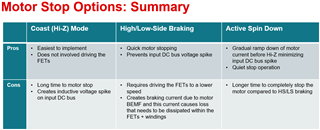
Figure 1: Motor Stop Options: Summary
Coast (Hi-Z) Mode
Engineers who choose this motor stop option typically choose it because it is the easiest option that doesn’t involve driving the FETs. The challenges with this motor stop option is that it is slow to stop the motor and creates and inductive spike through the supply in order to dissipate the energy from the motor. Designers should not choose this option if they need fast braking or their system supply is susceptible to voltage transients.
Coast (Hi-Z) mode is configured on the MCF8316A by setting MTR_STOP to 000b. When the motor stop command is received, the MCF8316A will transition into a high impedance (Hi-Z) state by turning off all MOSFETs. When the MCF8316A transitions from driving the motor into a Hi-Z state, the inductive current in the motor windings continues to flow and the energy returns to the power supply through the body diodes in the MOSFET output stage.
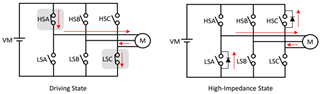
Figure 2: Coast (Hi-Z) Mode Example
In the example above, current is applied to the motor through the high-side phase-A MOSFET (HSA) and returned through the low-side phase-C MOSFET (LSC). When motor stop command is received all 6 MOSFETs transition to Hi-Z state and the inductive energy returns to supply through body diodes of MOSFETs LSA and HSC.
Recirculation Mode
Engineers who choose this motor stop option typically choose it because it solves the inductive spike problem in the Coast (Hi-Z) Mode by dissipating the energy by recirculating it through the FETs. The challenge with this motor stop option is that it requires driving the FETs and you must also know the exact rotor position before starting motor stop. If you don’t know the rotor position there can be very high inductive spikes.
Recirculation mode is configured on the MCF8316A by setting MTR_STOP to 001b. In order to prevent the inductive energy from returning to DC input supply during motor stop, the MCF8316A allows current to circulate within the MOSFETs by selectively turning OFF some of the active (ON) MOSFETs for a certain time (auto calculated recirculation time to allow the inductive current to decay to zero) before transitioning into Hi-Z by turning OFF the remaining MOSFETs. If high-side modulation was active, prior to motor stop command, then the high-side MOSFET is turned OFF on receiving motor stop command and the current recirculation takes place through low-side MOSFET (see example Figure 3). Once the recirculation time lapses, the low-side MOSFET also turns OFF and all MOSFETs are in Hi-Z state as seen in the figure below.
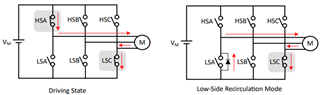
Figure 3: Low-Side Recirculation Mode Example
If low-side modulation was active, prior to motor stop command, then the low-side MOSFET is turned OFF on receiving motor stop command and the current recirculation takes place through high-side MOSFET (see example Figure 4). Once the recirculation time lapses, the high-side MOSFET also turns OFF and all MOSFETs are in Hi-Z state. This can be seen in the figure below.
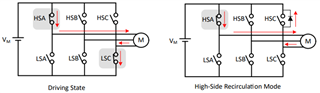
Figure 4: High-Side Recirculation Mode Example
Low-Side Braking
Engineers who choose to use low side braking for their system choose this option because it allows for quick stopping of the motor (when compared to Recirculation and Coast) while preventing supply pumping. The challenges with this motor stop option is that it involves driving the FETs and it creates a lot of inductive and back EMF current that need to be dissipated within the system.
Low-side braking mode is configured on the MCF8316A by setting MTR_STOP to 010b. When a motor stop command is received, the output speed is reduced to a value defined by ACT_SPIN_BRK_THR prior to turning all low-side MOSFETs ON for a time configured by MTR_STOP_BRK_TIME seen in Figure 4 below. If the motor speed is below ACT_SPIN_BRK_THR prior to receiving stop command, then the MCF8316A transitions directly into the brake state. After applying the brake for MTR_STOP_BRK_TIME, the MCF8316A transitions into the Hi-Z state by turning OFF all MOSFETs.
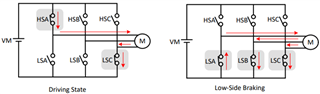
Figure 5: Low-Side Braking Example
The MCF8316A can also enter low-side braking through BRAKE pin input. When BRAKE pin is pulled to HIGH state, the output speed is reduced to a value defined by BRAKE_DUTY_THRESHOLD prior to turning all low-side MOSFETs ON. In this case, MCF8316A stays in low-side brake state till BRAKE pin changes to LOW state.
High-Side Braking
Similar to low-side braking, engineers who choose to use high side braking for their system choose this option because it allows for quick stopping of the motor (when compared to Recirculation and Coast) while preventing supply pumping. The challenges with this motor stop option is that it involves driving the FETs and it creates a lot of inductive and back EMF current that need to be dissipated within the system.
High-side braking mode is configured by setting MTR_STOP to 011b. When a motor stop command is received, the output speed is reduced to a value defined by ACT_SPIN_BRK_THR prior to turning all high-side MOSFETs ON (see example Figure 6) for a time configured by MTR_STOP_BRK_TIME. If the motor speed is below ACT_SPIN_BRK_THR prior to receiving stop command, then the MCF8316A transitions directly into the brake state. After applying the brake for MTR_STOP_BRK_TIME, the MCF8316A transitions into Hi-Z state by turning OFF all MOSFETs.
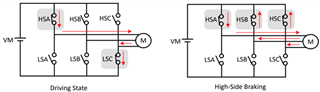
Figure 6: High-Side Braking Example
Active Spin-Down
Engineers can choose active spin down if they are looking for a motor stop option that is faster than high and low-side braking. By driving the FETs in the opposite direction, the motor can stop fast when compared to the other methods. The challenges associated with this motor stop option is that the driver will draw more current from the supply during this time that needs to be dissipated within the system by the motor or the FETs.
Active spin down mode is configured by setting MTR_STOP to 100b. When motor stop command is received, MCF8316A reduces duty cycle to ACT_SPIN_BRK_THR and then transitions to Hi-Z state by turning all MOSFETs OFF. The advantage of this mode is that by reducing duty cycle, the motor is decelerated to a lower speed thereby reducing the phase currents before entering Hi-Z. Now, when motor transitions into Hi-Z state, the energy transfer to power supply is reduced. The threshold ACT_SPIN_BRK_THR needs to configured high enough for MCF8316A to not lose synchronization with the motor.
Conclusion
Improper design of motor stop options can result in unintended motor transient spikes, damage to the system FETs, or inductive current spikes through the supply. When designing your system, take into consideration the contents listed in this blog post and how they could impact your overall design. Please reference the device datasheet for more information about motor stop options and how to configure them specifically for your device. All of these sensorless motor stop options can help engineers build robust sensorless systems and hopefully this short piece of content can help you decide which option is best for your system.
