


Hello,
I am performing an FMEDA for a motor control unit using two TI smart gate drivers (PN DRV3256EPAPRQ1). I am analyzing all the failure modes leading to unintended vehicle acceleration (over torque) and I found this nice document produced by TI. https://www.ti.com/lit/an/slua963b/slua963b.pdf?ts=1687252818028&ref_url=https%253A%252F%252Fwww.google.com%252F
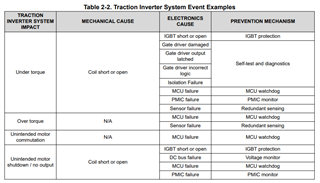
As can be seen from the picture, neither the failure of the smart gate driver nor the failure of the IGBT were considered as possible causes for the over torque system failure. I was wondering why.
In other articles (for instance https://www.e3s-conferences.org/articles/e3sconf/pdf/2020/44/e3sconf_icmed2020_01062.pdf) the IGBT short failure is considered a possible cause leading to unintended acceleration.
Thanks in advance for your support,
Kind regards,
M.Testoni
