Other Parts Discussed in Thread: MCF8316A, MOTORSTUDIO, MCF8329A
Hi Support folks
We have just received the above EVM and have connected USB, 12V power and a known good brushless motor to it.
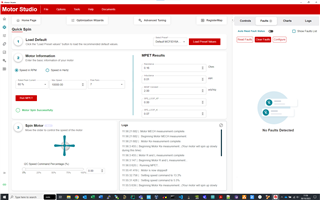
We've run the MCF8316A_GUI/ver/1.1.9 and followed the instructions to spin the motor, however it's not turning.
LEDs and power supplies, switch positions, jumper positions are nominal.
We can see a changing voltage (0 to 3.3V) on J6 SPEED jumper when we turn Pot R4, but the motor doesn't turn in ANALOG mode.
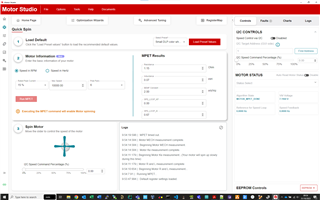
If we switch to I2C speed control mode we can't see any activity on the SDA or SCL lines and the motor doesn't turn.
There is also no activity on the I2C lines when we try to read the EEPROM, or activity on the ABC outputs to the motor when we try to drive the motor.
Can you advise?
Thanks