Other Parts Discussed in Thread: MCT8316A
Hi, team.
I've heard it before, but please let me know how to to align and start up the BLDC motor to get the correct waveform?
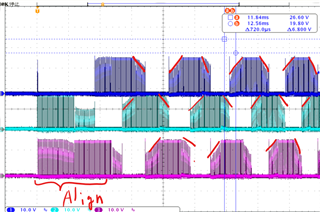
The problem is slope of the no-energized period appears to be reversed as shown in fig.1.
I would like to get the waveform shown in fig.2 at startup.
(The waveform at startup of a commercially ESC will immediately look like fig.2.)
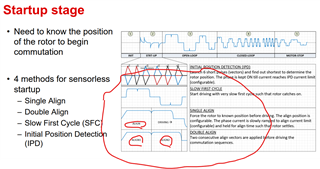
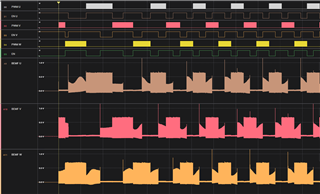
I use double align for start up like fig.3.
Is it necessary to monitor voltage or current values during the align period for a successful startup?
fig1. My BEMF waveform at start up and open loop control

fig2. Desired Waveform
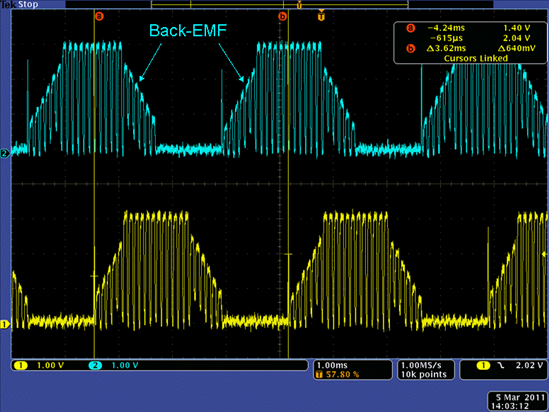
fig.3 Stages of Motor Control TI Precision Labs – Motor Drivers page 6