Dear Sirs,
We have a design with two DRV8308.
We are adjusting the parameters for differents loads and speeds in very large range. We have a doubt with the Clock Frequency Mode we are using. First it looks a single speed loop PI with some optional automatic gain and advance corrections.
More or less, we are able to choose the parameters for each case in practice, Also we try to replicate the functionality of this speed close-loop mode in a simulation software for faster results.
We have a doubt with the Clock Frequency Mode.
Page 40 of the datasheet:
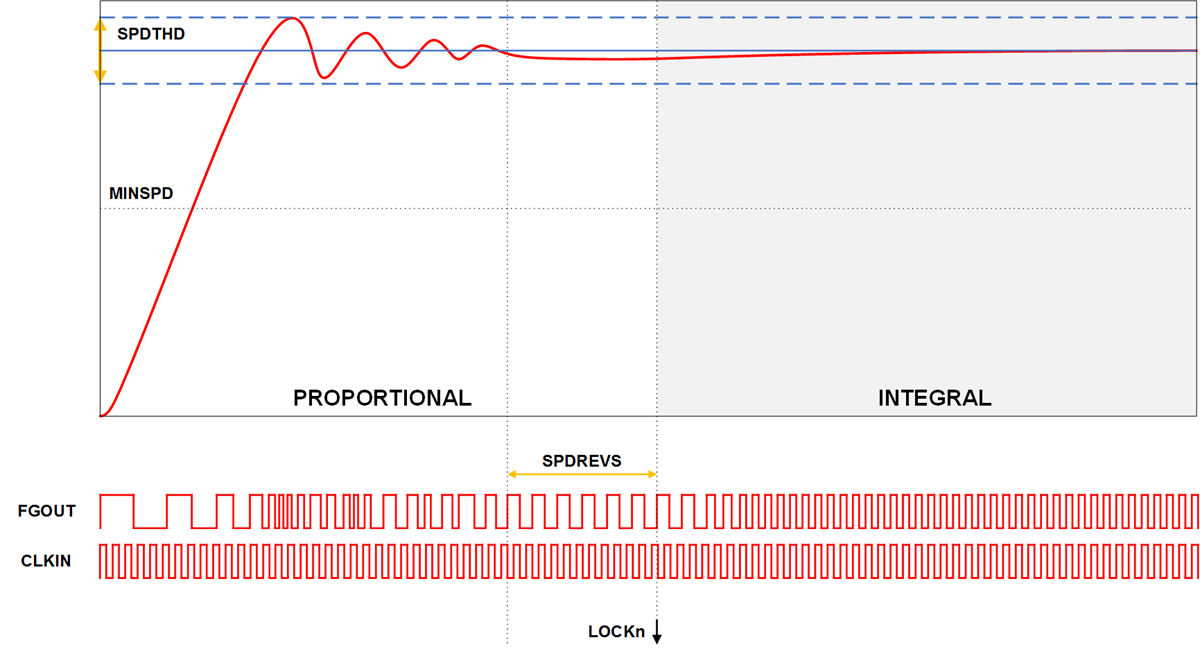
SPEED parameter: In the the Clock Frequency Mode, SPEED sets the open-loop gain during spin-up before LOCKn goes Low.
What does it mean? It´s not in close-loop mode from the start? The LOOPGAIN, SPDGAIN, and the other parameters, close-loop related, have not influence during spin-up. The duty cycle of the PWM is not calculated from the start until the speed reaches CLKIN?
Thanks and best regards
Javier Vicandi