


Other Parts Discussed in Thread: MSP430FR2355, TIDA-00774, CSD88584Q5DC, TIDA-01516, DRV832X
Tool/software: Code Composer Studio
Hello, I'm using the DRV8323 to drive a brushless motor using sensored 1xPWM mode. I'm using MSP430FR2355 microcontroller to interface via SPI with the driver.
I'm using drv8323.h and drv8323.c from TIDA-00774 reference design to configure the driver, here is the code I use:
//DRV8323
P4DIR &= ~(BIT3); //Inputs - FAULT
P6DIR |= (BIT1); //Output - EN_GATE
P6DIR |= (BIT3); //Output - DIR
P6OUT |= BIT3;
P6DIR |= BIT4; //Output BREAK
P6OUT |= BIT4;
//code for DRV8323-SPI communication CS:P4.4, SCLK:P4.5, SDI:P4.6, SDO:P4.7
P4DIR |= BIT6; //GPIO-SDI
P4OUT &= ~BIT6; //Output-SDI
P4DIR &= ~BIT7; //Input SDO
P4DIR |= BIT5; //Output SCLK
P4OUT &= ~BIT5;
P4DIR |= BIT4; //Output nSCS
P4OUT |= BIT4;
P4DIR |= BIT2; //Output DRV_CAL
// code to enable the driver
P6OUT &= ~BIT1;
delay_us(150);
P6OUT |= BIT1;
delay_us(10); //10 us delay
//P4.2 DRV_CAL
P4OUT |= BIT1;
delay_us(150);
P4OUT &= ~BIT1;
delay_us(10); //10 us delay
//FAULT interrupt
P4IES |= BIT3;
P4IE |= BIT3;
P4IFG &= ~BIT3;
DRV8x_Analog_Init();
//Code for DRV8x_Analog_Init()
void DRV8x_Analog_Init(void)
{
SPI_Write(GATE_DRIVE_HS_REG, 0x03BF);
delay_1ms(1);
SPI_Write(GATE_DRIVE_HS_REG, 0x03BF);
delay_1ms(1);
SPI_Write(ADR_DRV_CTRL_REG, 0x0053);
delay_1ms(1);
SPI_Write(GATE_DRIVE_LS_REG, 0x06FF);
delay_1ms(1);
SPI_Write(OCP_CTRL_REG, 0x0160); //0x0160
delay_1ms(1);
SPI_Write(CSA_CTRL_REG, 0x0083); //0x0683
delay_1ms(1);
}
// code from drv8323.c
void SPI_Write(uint8_t address, uint16_t value)
{
uint8_t i;
uint16_t command = 0x0000;
address = address & 0x0F;
value &= 0x07FF;
command &= ~0x8000; //write command
command |= (address << 11U) + value; //set address and value
M1_SCLK_LOW;
__delay_cycles(15);
M1_nSCS_LOW;
__delay_cycles(15);
for (i=0; i<16; i++)
{
M1_SCLK_HIGH;
__delay_cycles(15);
if (((command >> (15 - i)) & 0x01) == 0x01)
{
M1_SDI_HIGH;
}
else
{
M1_SDI_LOW;
}
__delay_cycles(15);
M1_SCLK_LOW;
__delay_cycles(30);
}
M1_nSCS_HIGH;
__delay_cycles(15);
}
// some defines
#define M1_SCLK_HIGH (P4OUT |= BIT5)
#define M1_SCLK_LOW (P4OUT &= ~BIT5)
#define M1_SDI_HIGH (P4OUT |= BIT6)
#define M1_SDI_LOW (P4OUT &= ~BIT6)
#define M1_SDO_LEVEL ((P4IN &= BIT7)?(1):(0))
#define M1_nSCS_HIGH (P4OUT |= BIT4)
#define M1_nSCS_LOW (P4OUT &= ~BIT4)
I don't know if there's something wrong in the driver's configuration, I can't make it work. I attach schematics
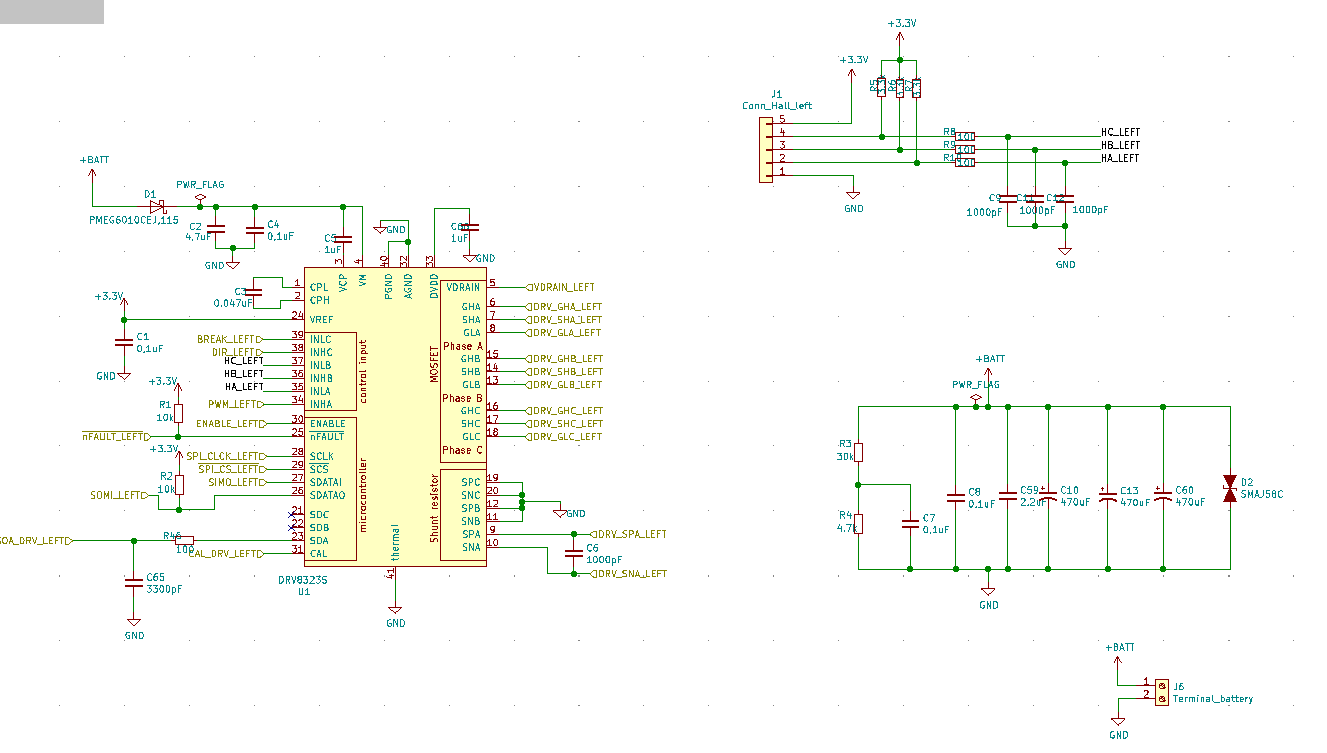
I'm using csd88584q5dc half-bridge power block,

I have the PWM signal in INHA pin, I see it with an oscilloscope, also the hall sensor inputs connected to the corresponding pins in schematic. I'm using 24V as VM.
I based my design on TIDA-00774 and TIDA-01516, I'm not an expert in the motor drivers field and I can realize there are lot of concepts and information I don't know,
Is the configuration I'm using ok? Any help would be really appreciated. Thanks in advance.
Diana


