


Other Parts Discussed in Thread: INA202
Hello Engineers,
I'm designing a 60A BLDC controller around the DRV8320 and the Raspberry Pico. As a means to simplify the firmware I choose the 1xPWM mode.
Open Source design files on Oshpark (link).
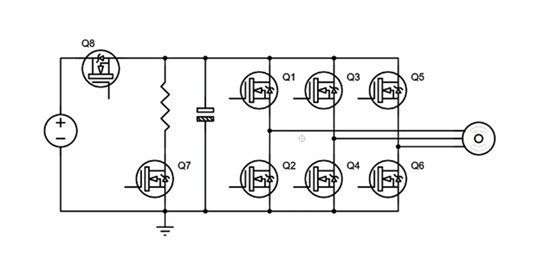
The image above shows a simplification of the schematic. Q1-Q6 are controlled by the DRV8320 while Q7 and Q8 are controlled by the Raspberry Pico.
From what I can fathom I have three ways to brake:
1. Using the DRV8320 brake pin, which opens Q2, Q4 and Q6
2. Using resistive braking, put the direction pin in reverse while closing Q8 and opening Q7
3. Regenerative braking, put the direction pin in reverse while keeping Q8 open. Monitor the bus voltage and open Q7 (and close Q8) when the voltage exceeds a threshold.
Am I correct in the assumption that I need to put the direction pin in reverse while still applying a PWM?
What effect does the PWM duty-cycle have on the regenerative braking?

