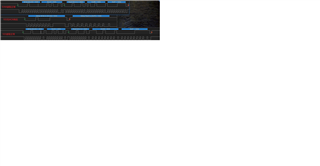
We used BQ76942 to connect to the upper computer for communication, and read the communication ACK response is normal.
However, when disconnect the MCU on the EVM board and connect BQ76942 to STM32F103 MCU, ACK does not respond. Occasionally, ACK response will be received. The error rate is too high.