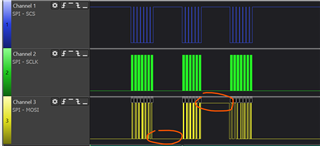
We use Infineon TC377 as the host and the output state of the MOSI pin is determined by the state of the last bit of data sent by the host.
According to BQ79600 datasheet, master shall always drive MOSI to ‘1’ when not sending command frame into device.
How can I achieve this?