

Other Parts Discussed in Thread: LMG1020, LMK61E2EVM
Hi Colleagues,
According to customer needs, I want to use the LMG1020 to drive laser devices.
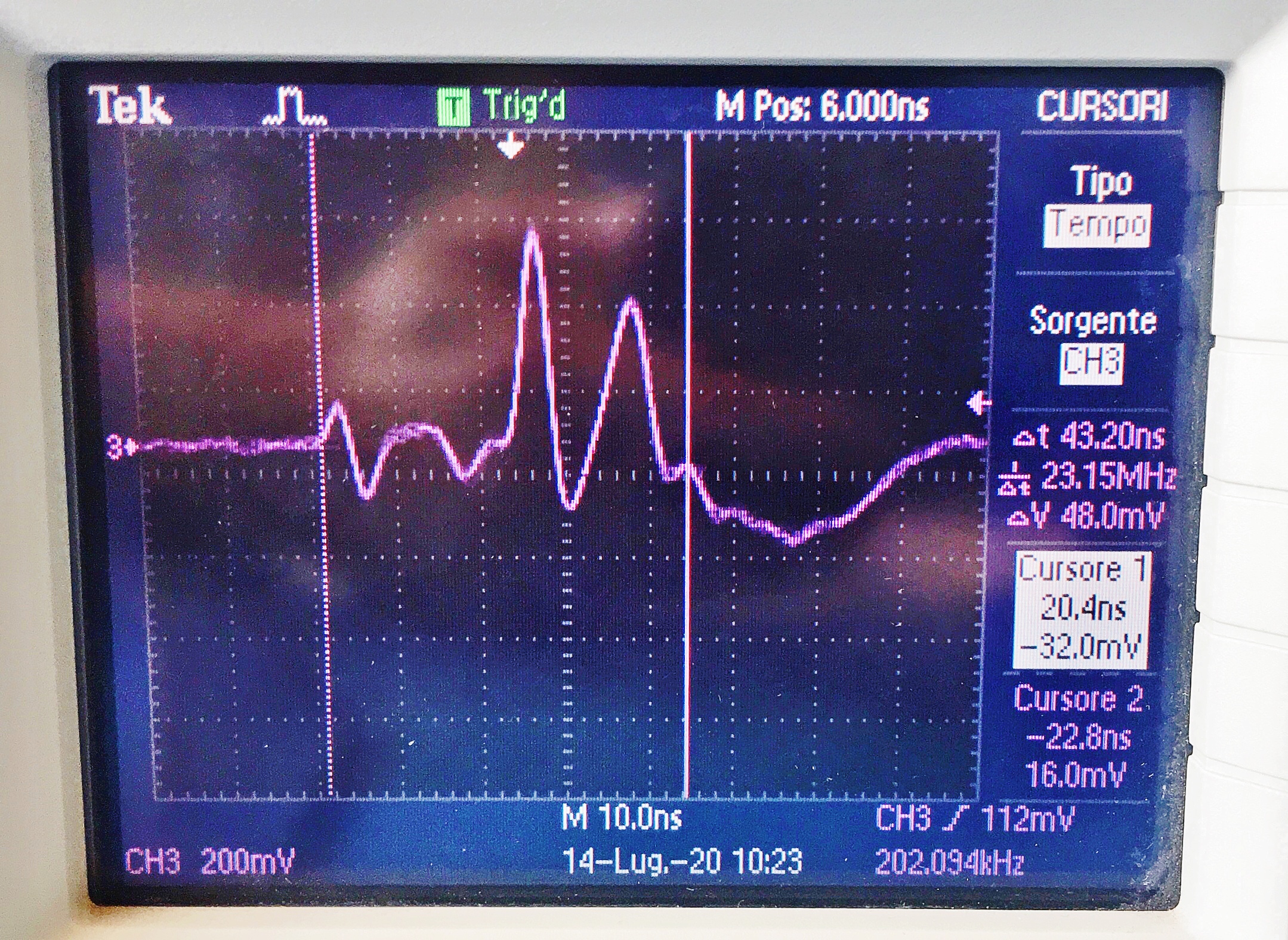
During the test, I found that when inputting a 1ns pulse width signal, the output signal of the LMG1020EVM is a strange waveform, which is not the ideal 1ns pulse width.As shown below.

After reading 《Optimizing Gate Driver Layout for LiDAR Applications》, I found that this output waveform may be caused by the inductance(marked in yellow) in the loop.As shown below.
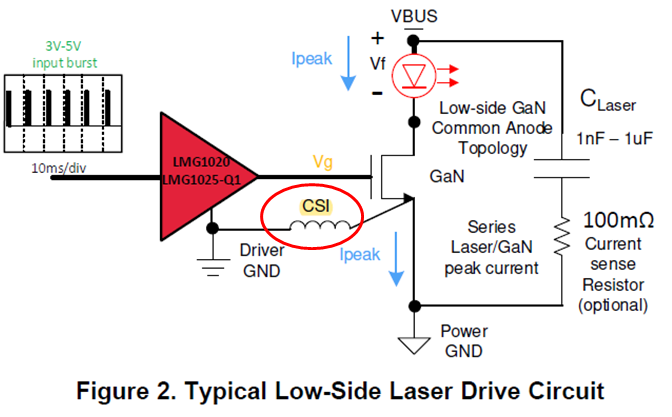
But the reason is not elaborated in the text, so I would like to ask how the inductance affects the output waveform in detail.
The link to 《Optimizing Gate Driver Layout for LiDAR Applications》 is as follows.
《Optimizing Gate Driver Layout for LiDAR Applications》.pdf
Best regards!




{kind=link}