

Other Parts Discussed in Thread: MATHLIB
Hi,
How to utilize the clock ticks to measure the time taken for the code execution?

This thread has been locked.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
Hi,
How to utilize the clock ticks to measure the time taken for the code execution?
How to utilize the clock ticks to measure the time taken for the code execution?
Type 1: FOR PDK / SDK examples, which encloses the CSL library.
Type 2: For other Mathlib package which doesnot enclose the CSL library.
---
For cycle time, the following methods shall be used.
================
This will make use of the clock ticks/cycles of DSP core running at 1000 MHz and it will be precise...
=================
Type 1: FOR PDK / SDK examples, which encloses the CSL library.
Code snippet:
//Start-Declaration for time ticks
#include "C:\ti\pdk_keystone2_3_01_04_07\packages\ti\csl\csl_tsc.h"
//<ti/csl/csl_tsc.h> // check the path where the csl_tsc.h is located. Accordingly include the path of the file.
extern uint32_t utilReadTime32();
//End-Declaration for time ticks
......
/*Throughput calculation initialization */
unsigned int StartTime = 0;
unsigned int EndTime = 0;
unsigned int Total_cycle_ticks = 0;
/*Throughput calculation initialization Ends */
.......
//Usage
/* Enable the time stamp counter. */
CSL_tscEnable();
StartTime = utilReadTime32();
// Please insert your code here
sauConnDmPktTest(tf, pat,
100, /* Number of packets per connection */
512, /* initial payload length */
0, /* payload llength increment step */
SAU_PAYLOAD_INC8 /* payload pattern */
);
EndTime = utilReadTime32();
Total_cycle_ticks = EndTime-StartTime;
System_printf("StartTime = %d \n", StartTime);
System_printf("EndTime = %d \n", EndTime);
System_printf("Total_cycle_ticks = %d \n", Total_cycle_ticks);
// System_printf(" sauConnDmPktTest 2048 PacketSize, 100 packets -Total_cycle_ticks = %d \n", Total_cycle_ticks);
------------------
Time tick calculation , you can use according to the number of Total_cycle_ticks, you get......
Total no of CPU cycles = cycles
DSP core frequency = 1000 MHz
Time = 1 / Freq ( General formula )
= 1 / 1000 MHz ( DSP core frequency )
= 0.001 us ( Micro seconds)
1000000000 cycles = 1 sec
=>32149501 cycles = 0.032 sec
-----------------------
Type 2: For other Mathlib package which doesnot enclose the CSL library.
Pre-requisite :
Download and install "PROCESSOR-SDK-RTOS-C667x 06_03_00_106"
from https://software-dl.ti.com/processor-sdk-rtos/esd/C667x/latest/index_FDS.html
( Please install the SDK in the recommended path: C:\ti\)
This will include the CSL library.
--
utilize the "TSCH" to calculate the cycles taken for the function, "atan2sp_v"
Steps:
In the file, atan2sp_d.c, do the following.
Step 1:
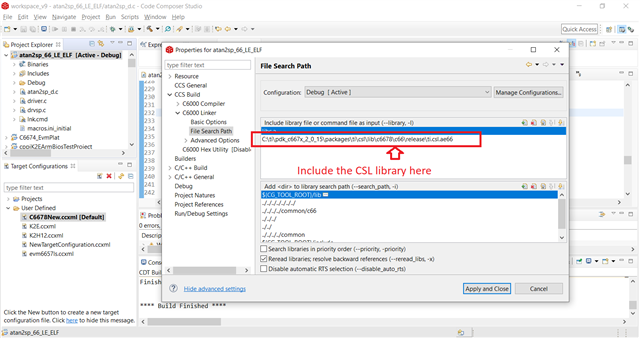
1. extern void CSL_tscEnable(void); // This function is part of CSL library. We have to include library, "ti.csl.ae66" located in the C:\ti\pdk_c667x_2_0_15\packages\ti\csl\lib\c6678\c66\release\ti.csl.ae66 in the project configuration. ( Look at the snapshot below )
Step 2:
2. Declare these variables.
/*Throughput calculation initialization */
unsigned int StartTime = 0;
unsigned int EndTime = 0;
unsigned int Total_cycle_ticks = 0;
/*Throughput calculation initialization Ends */
Step 3:
3. Define the utilReadTime32() function.
/*****************************************************************************
* Function: Utility function a cycle clock
****************************************************************************/
extern cregister volatile unsigned int TSCL;
uint32_t utilReadTime32()
{
uint32_t timeVal;
timeVal = TSCL;
return timeVal;
}
Step 4:
/* Enable the time stamp counter. */
CSL_tscEnable();
StartTime = utilReadTime32();
atan2sp_v (a_sc, b_sc, output[MTH_FCN_VEC], NUM_SC_INPUTS*NUM_SC_INPUTS);
EndTime = utilReadTime32();
Total_cycle_ticks = EndTime-StartTime;
printf("StartTime = %d \n", StartTime);
printf("EndTime = %d \n", EndTime);
printf("Total_cycle_ticks = %d \n", Total_cycle_ticks);
---
The modified source file is available here:
/* ======================================================================== *
* MATHLIB -- TI Floating-Point Math Function Library *
* *
* *
* Copyright (C) 2011 Texas Instruments Incorporated - http://www.ti.com/ *
* *
* *
* Redistribution and use in source and binary forms, with or without *
* modification, are permitted provided that the following conditions *
* are met: *
* *
* Redistributions of source code must retain the above copyright *
* notice, this list of conditions and the following disclaimer. *
* *
* Redistributions in binary form must reproduce the above copyright *
* notice, this list of conditions and the following disclaimer in the *
* documentation and/or other materials provided with the *
* distribution. *
* *
* Neither the name of Texas Instruments Incorporated nor the names of *
* its contributors may be used to endorse or promote products derived *
* from this software without specific prior written permission. *
* *
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS *
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT *
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR *
* A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT *
* OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, *
* SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT *
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, *
* DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY *
* THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT *
* (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE *
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. *
* ======================================================================== */
/* ======================================================================= */
/* atan2sp_d.h - arctangent two argument driver file */
/* ======================================================================= */
//Shankari-Start-Declaration for time ticks
//#include "C:\ti\pdk_c667x_2_0_16\packages\ti\csl\csl_tsc.h"
//#include <ti/csl/csl_tsc.h>
//extern uint32_t utilReadTime32();
//Shankari-End-Declaration for time ticks
//Shankari declare the CSL_tscEnable as extern.
extern void CSL_tscEnable(void);
#include <float.h>
#include <stdio.h>
#include <math.h>
#include <stdlib.h>
#include <ti/mathlib/src/common/common.h>
#include <ti/mathlib/src/common/drvsp.h>
#include "atan2sp.h"
/* ======================================================================== */
/* Defines for driver test functionality */
/* ======================================================================== */
/*Throughput calculation initialization */
unsigned int StartTime = 0;
unsigned int EndTime = 0;
unsigned int Total_cycle_ticks = 0;
/*Throughput calculation initialization Ends */
/* Range for random inputs: RAND_OFFSET to (RAND_RANGE + RAND_OFFSET) */
#define RAND_RANGE (2*MTH_TWO_PI)
#define RAND_OFFSET ( -MTH_TWO_PI)
/* Number of input arguments */
#define NUM_INPUTS (201)
#define NUM_SC_INPUTS (6)
#define NUM_EXT_INPUTS (237)
/* Floating Point Tolerances */
#define RET_VAL_TOL (1e-6)
/* Number of random test values */
#define BUF_SIZE (128)
/* Function name */
#define KERNEL_NAME "atan2SP"
/* Equality comparison requirements */
#define KERNEL_REQ (MTH_REQ_PERCENT)
/* ======================================================================== */
/* Pre-defined input test data */
/* ======================================================================== */
float a [NUM_INPUTS] = {
/* 0 - 09 */ 2.3135381, 1.8968619, -0.0756768, 0.8868028, -0.9800547, 0.1826697, -1.1155889, -1.0483080, 1.6465753, -0.8641856,
/* 10 - 19 */ -0.8528155, -1.9450655, -2.6390254, 0.5221994, 2.8218998, -0.9806798, -3.1345328, -1.9067114, -2.3209479, 1.0272207,
/* 20 - 29 */ 2.8233285, 2.6390254, 1.1275215, 1.3495004, -2.9128084, -1.9651832, -2.5642326, 1.8925702, -2.3064093, -2.1316203,
/* 30 - 39 */ 0.4856401, 2.7499643, 1.9174446, 1.3146485, -2.7798670, 2.2517497, -1.0791098, -0.4656905, -1.9318173, -3.0600822,
/* 40 - 49 */ 1.4257409, 0.8000701, -0.9783753, 0.4934743, 1.3673927, -1.0034392, 0.6332442, -0.3479142, 1.5669944, -1.1302520,
/* 50 - 59 */ 1.6678470, -1.8060988, 3.0330084, -2.9716971, -0.9224464, -1.7681531, -1.2403497, 0.9910658, 0.7251339, 0.0664521,
/* 60 - 69 */ -1.1956786, -2.4353275, 0.0850895, 2.2100750, -1.0904034, -3.0326055, 1.3948207, 1.3624830, -0.6940544, 1.3543253,
/* 70 - 79 */ 0.8774785, -1.1167824, -1.5397275, -1.4583951, -0.7318605, 0.4957987, -0.5997590, -0.2675051, 1.8631171, -2.2671664,
/* 80 - 89 */ -2.9832040, 1.7920738, -0.5029850, -0.9580196, -2.9132679, -0.2031369, 0.2392143, -1.2708957, -2.7262275, -0.3890131,
/* 90 - 99 */ -2.3026158, 1.7395388, -0.1722220, -0.8664596, 2.6893643, -1.2955357, -1.1141723, 0.6524964, -1.0036292, -2.5341911,
/* 100 - 109 */ -0.6030755, -1.4845922, 0.1847009, -2.2969809, -1.7284012, -2.1670837, -0.9162604, -2.6918627, -3.0926890, 1.9026916,
/* 110 - 119 */ -0.6157909, -1.2167198, 1.3122679, -0.2426267, 2.9885612, 2.7933659, 3.0079707, -2.5318231, -2.4902929, 1.9892559,
/* 120 - 129 */ -1.8243082, -0.6330179, 0.1249213, -0.2402831, -0.0144180, 1.7226800, 1.2449822, -2.1712261, 1.0182503, -0.9841044,
/* 130 - 139 */ 1.8955267, 2.3830600, -1.5845531, 2.8392730, 1.5114688, -1.1034743, 0.0325057, -2.1286954, -2.3589811, 2.7031802,
/* 140 - 149 */ -0.5401727, -1.5467144, -1.2573473, 2.0498470, 1.0994474, -1.6878354, -1.2113809, 2.3451656, 1.1922679, 1.9623993,
/* 150 - 159 */ 2.6861392, 0.9585329, 0.6380016, -0.4698215, 0.9541665, -0.2773711, -1.5496726, -1.6967815, 1.1994481, -1.2693016,
/* 160 - 169 */ -1.7465209, -2.4450130, 2.9895873, 2.6623165, 1.8586202, 0.9722465, -2.2202118, 1.7101600, 3.0139285, -2.0721991,
/* 170 - 179 */ 0.5109130, -2.9975483, -0.0452963, 1.1814785, -0.8643483, 0.4049361, 1.8757297, 2.9287528, -1.3302178, -3.1057060,
/* 180 - 189 */ -2.8633637, -0.1973840, 2.4147408, 1.1097204, -2.3930683, -0.7517271, -0.6176767, 0.7760660, 0.7684358, 0.6968723,
/* 190 - 199 */ 1.7993756, 0.6814629, 2.3639156, 1.7913911, 1.4757554, -2.4254864, 2.6482566, -1.6377824, 0.8112791, -0.9589719,
/* 200 - 200 */ 0.0636593,
};
float b [NUM_INPUTS] = {
/* 0 - 09 */ -91.2572958, 18.7408531, -53.8650442, -75.7569229, 96.3077229, -7.6091001, -19.2073345, 90.0992421, 8.8307813, 58.0715861,
/* 10 - 19 */ -55.1536422, 82.1953898, 90.7922245, 70.3973330, 54.3926883, 27.9326546, -70.8640362, 28.7746900, 67.9949544, -4.3990179,
/* 20 - 29 */ 56.3853689, 72.7330394, 89.7958760, 0.6506345, -53.2568907, 90.5001414, -34.3886068, 0.1867002, 18.4165466, -89.5764153,
/* 30 - 39 */ 86.0586351, 96.1277471, 33.6452472, -93.5818388, -13.4470613, -65.5907704, -99.7548511, -4.3503695, -56.5984360, -97.3693208,
/* 40 - 49 */ 66.9302629, 39.2945708, -19.9401670, -65.2324650, -72.0181957, 40.9931386, 62.4405059, -93.5376590, 20.1598249, -49.2629567,
/* 50 - 59 */ 97.3422339, 38.1619053, 24.9950952, 57.8565606, -59.7228016, 94.3208155, -33.4966502, 1.9489241, -13.1378145, -17.3492702,
/* 60 - 69 */ 15.8208954, -40.3999316, -21.6943411, -46.7005935, 83.4348239, 56.1003863, -0.9574840, 3.5718092, 26.1776647, -42.3677828,
/* 70 - 79 */ 75.9682995, 71.6556690, 43.3485769, 74.3978270, -17.6547310, 40.5521602, 79.0387887, -37.0366985, 32.3184751, -64.2953153,
/* 80 - 89 */ 21.3656540, -79.2134105, 87.1901856, -72.6390439, -99.0990864, -10.6543498, -51.6327866, -68.6458331, 93.0084248, -45.0833611,
/* 90 - 99 */ -37.1702853, 5.1907654, -83.6970233, -52.2043266, 21.5931263, -51.1775924, 32.6228238, 40.7333065, -41.1037088, -92.1953541,
/* 100 - 109 */ 47.8323105, 51.2813626, -46.9896947, -27.5270931, -87.4029587, -59.7726969, -74.5733577, -25.9424445, -78.4035322, 12.3785878,
/* 110 - 119 */ -58.3340343, 89.3806460, -89.5980000, -85.7810516, 12.0531909, 40.0593417, 61.7391895, 40.9334400, 87.7929490, 88.5997007,
/* 120 - 129 */ -99.2242204, -73.7385827, 67.2410088, 43.0963350, 93.5867665, 51.0842296, -8.7863589, 55.6547355, 54.9392907, 37.9593670,
/* 130 - 139 */ 41.4129360, 21.6191053, -58.7140204, 53.4582739, -50.1859543, -21.1997344, 51.5337994, 10.5222224, -14.6191417, -89.4206358,
/* 140 - 149 */ 28.6006195, -37.8060334, -35.7869307, -55.6486036, 61.7771647, -92.8920502, 47.2177382, -50.7940962, 82.0212409, -12.0875024,
/* 150 - 159 */ -64.5874273, -60.2094873, -38.0300459, 89.7133750, 76.1698976, 73.2225305, -76.2539171, 42.4176305, 60.8972830, 51.4205129,
/* 160 - 169 */ -71.9763577, 19.9461477, 22.6601886, -80.4704549, 80.2687399, -60.5444334, 40.8969899, 66.7207540, 31.5421414, 60.5660213,
/* 170 - 179 */ -63.2807533, 26.1853248, -24.6500728, -10.7415857, 76.0305761, 73.5657775, 49.2212160, 73.1837210, -32.8017910, 30.0932223,
/* 180 - 189 */ -65.3040785, 4.7972407, 64.1718504, 57.8754685, 55.7897783, 20.5711835, -35.8692133, 67.7430589, -18.7016050, 98.6509677,
/* 190 - 199 */ 6.7179056, -90.9222510, 24.8186046, -36.4573513, 77.1555061, -23.1775585, 40.8544334, 82.2189711, 2.3360194, 11.5269520,
/* 200 - 200 */ 31.0396471,
};
/*****************************************************************************
* Function: Utility function a cycle clock
****************************************************************************/
//shankari
extern cregister volatile unsigned int TSCL;
uint32_t utilReadTime32()
{
uint32_t timeVal;
timeVal = TSCL;
return timeVal;
}
/* ======================================================================== */
/* Main test driver */
/* ======================================================================== */
void main()
{
int i, j, k;
/* ======================================================================== */
/* INITIALIZATION */
/* ======================================================================== */
/* Initialize the driver */
driver_init (KERNEL_NAME);
/* ======================================================================== */
/* PREDEFINED TEST DATA */
/* ======================================================================== */
/* Obtain results using predefined test vectors */
for (i = 0; i < NUM_INPUTS ; i++) {
output[MTH_FCN_RTS][i] = atan2f (a[i],b[i]);
}
for (i = 0; i < NUM_INPUTS ; i++) {
output[MTH_FCN_ASM][i] = atan2sp (a[i],b[i]);
}
for (i = 0; i < NUM_INPUTS; i++) {
output[MTH_FCN_CI][i] = atan2sp_c (a[i],b[i]);
}
for (i = 0; i < NUM_INPUTS ; i++) {
output[MTH_FCN_INL][i] = atan2sp_i (a[i],b[i]);
}
atan2sp_v (a, b, output[MTH_FCN_VEC], NUM_INPUTS);
/* Check results and display */
allequal (NUM_INPUTS, RET_VAL_TOL, KERNEL_REQ);
print_test_results (MTH_TST_PREDEF);
/* ======================================================================== */
/* SPECIAL CASE and EXTENDED RANGE TEST DATA */
/* ======================================================================== */
/* Obtain results using special case test vectors */
a_sc[0] = b_sc[0] = 0;
a_sc[1] = b_sc[1] = _itof(0x80000000);
a_sc[2] = b_sc[2] = _itof(0x7F800000);
a_sc[3] = b_sc[3] = _itof(0xFF800000);
a_sc[4] = b_sc[4] = 1;
a_sc[5] = b_sc[5] = -1;
i = NUM_SC_INPUTS;
for (j = 1; j < NUM_SC_INPUTS ; j++) {
for (k = 0; k < NUM_SC_INPUTS ; k++) {
a_sc[i] = a_sc[k];
b_sc[i] = b_sc[(j+k)%NUM_SC_INPUTS];
i++;
}
}
i = 0;
for (j = 0; j < NUM_SC_INPUTS ; j++) {
for (k = 0; k < NUM_SC_INPUTS ; k++) {
output[MTH_FCN_RTS][i] = atan2 (a_sc[i],b_sc[i]);
output[MTH_FCN_ASM][i] = (b_sc[i] < 0) ? atan2(a_sc[i],b_sc[i]) : atan2sp(a_sc[i],b_sc[i]); // ignore Asm result when b is negative
output[MTH_FCN_CI] [i] = atan2sp_c (a_sc[i],b_sc[i]);
output[MTH_FCN_INL][i] = atan2sp_i (a_sc[i],b_sc[i]);
i++;
}
}
/* Enable the time stamp counter. */
CSL_tscEnable();
StartTime = utilReadTime32();
atan2sp_v (a_sc, b_sc, output[MTH_FCN_VEC], NUM_SC_INPUTS*NUM_SC_INPUTS);
EndTime = utilReadTime32();
Total_cycle_ticks = EndTime-StartTime;
printf("StartTime = %d \n", StartTime);
printf("EndTime = %d \n", EndTime);
printf("Total_cycle_ticks = %d \n", Total_cycle_ticks);
/* Check results and display */
allequal (NUM_SC_INPUTS*NUM_SC_INPUTS, RET_VAL_TOL, KERNEL_REQ);
print_test_results (MTH_TST_SPECIAL);
/* Obtain results using extended range test vectors */
a_ext[0] = FLT_MIN;
b_ext[0] = 1.;
for (i = 0; i < NUM_EXT_INPUTS ; i++) {
output[MTH_FCN_RTS][i] = atan2 (a_ext[i],b_ext[i]);
output[MTH_FCN_ASM][i] = atan2sp (a_ext[i],b_ext[i]);
output[MTH_FCN_CI] [i] = atan2sp_c (a_ext[i],b_ext[i]);
output[MTH_FCN_INL][i] = atan2sp_i (a_ext[i],b_ext[i]);
a_ext[i+1] = a_ext[i] * 2.1;
b_ext[i+1] = b_ext[i] *(-1.);
}
atan2sp_v (a_ext, b_ext, output[MTH_FCN_VEC], NUM_EXT_INPUTS);
/* Check results and display */
allequal (NUM_EXT_INPUTS, RET_VAL_TOL, KERNEL_REQ);
print_test_results (MTH_TST_EXTENDED);
/* ======================================================================== */
/* RANDOM TEST DATA & PROFILING */
/* ======================================================================== */
// Time the fastRTS inline function
profile_init (MTH_FCN_INL);
for (i = 0; i < BUF_SIZE; i++) {
/* Fill input random data vectors */
input[0][i] = gimme_random (RAND_RANGE, RAND_OFFSET);
input[1][i] = gimme_random (RAND_RANGE, RAND_OFFSET);
/* Run the inline routine */
profile_start ();
output[MTH_FCN_INL][i] = atan2sp_i (input[0][i],input[1][i]);
profile_update (MTH_FCN_INL);
}
profile_avg (MTH_FCN_INL, BUF_SIZE);
// Time the RTS function
profile_init (MTH_FCN_RTS);
for (i = 0; i < BUF_SIZE; i++) {
output[MTH_FCN_RTS][i] = atan2f (input[0][i],input[1][i]);
}
profile_update (MTH_FCN_RTS);
profile_avg (MTH_FCN_RTS, BUF_SIZE);
// Time the fastRTS ASM function
profile_init (MTH_FCN_ASM);
for (i = 0; i < BUF_SIZE; i++) {
output[MTH_FCN_ASM][i] = atan2sp (input[0][i],input[1][i]);
}
profile_update (MTH_FCN_ASM);
profile_avg (MTH_FCN_ASM, BUF_SIZE);
// Time the fastRTS C intrinsic function
profile_init (MTH_FCN_CI);
for (i = 0; i < BUF_SIZE; i++) {
output[MTH_FCN_CI][i] = atan2sp_c (input[0][i],input[1][i]);
}
profile_update (MTH_FCN_CI);
profile_avg (MTH_FCN_CI, BUF_SIZE);
// Time the fastRTS vector function
profile_init (MTH_FCN_VEC);
atan2sp_v (input[0], input[1], output[MTH_FCN_VEC], BUF_SIZE);
profile_update (MTH_FCN_VEC);
profile_avg (MTH_FCN_VEC, BUF_SIZE);
/* Display Random Test Vector Results */
allequal (BUF_SIZE, RET_VAL_TOL, KERNEL_REQ);
print_test_results (MTH_TST_RANDOM);
print_hline ();
/* ======================================================================== */
/* CYCLE AND MEMORY REQUIREMENTS */
/* ======================================================================== */
/* Display profiling results */
print_profile_results (KERNEL_NAME);
/* Display memory requirements */
print_memory_results (KERNEL_NAME);
}
/* ======================================================================== */
/* End of file: atan2sp_d.c */
/* ======================================================================== */
Output console messages :
[C66xx_0]
--------------------------------------------------------------------------------
Verification Results: atan2SP
--------------------------------------------------------------------------------
Pre-defined Data: Passed
StartTime = 7
EndTime = 864
Total_cycle_ticks = 857
Special Case Data: Failed (ASM,C,INL,VEC)
Extended Range Data: Passed
Random Data (seed = 30578): Passed
--------------------------------------------------------------------------------
--------------------------------------------------------------------------------
Cycle Profile: atan2SP
--------------------------------------------------------------------------------
RTS: 363 cycles
ASM: 126 cycles
C: 126 cycles
Inline: 472 cycles
Vector: 21 cycles
--------------------------------------------------------------------------------
--------------------------------------------------------------------------------
Memory Profile: atan2SP
--------------------------------------------------------------------------------
ASM: 0 bytes
C: 896 bytes
Vector: 2688 bytes
--------------------------------------------------------------------------------
Time tick calculation , you can use according to the number of Total_cycle_ticks, you get......
------------------
Step 5:
Total no of CPU cycles = cycles
DSP core frequency = 1000 MHz
Time = 1 / Freq ( General formula )
= 1 / 1000 MHz ( DSP core frequency )
= 0.001 us ( Micro seconds)
1000000000 cycles = 1 sec
=>32149501 cycles = 0.032 sec
-----------------> here we receive Total_cycle_ticks = 857 ===> ( (1/1000000000) * 857 = 0.000000857 seconds )
---------------------------
snapshot to include the CSL library in the build configuration:
Regards
Shankari G
