Other Parts Discussed in Thread: AM2634
HI,
I'm using AM2634 CAN but some issues may need your help:
1. CAN bus has some error frame appear randomly.
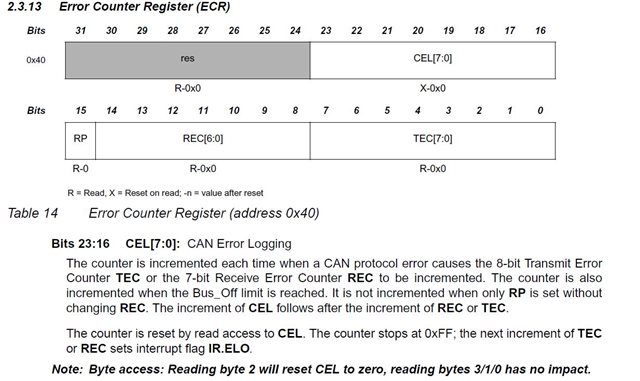
I want to know how to use the parameter like recErrCnt,canErrLogCnt in MCAN_ErrCntStatus
How these counters work? Which conditions will the counter reset?

2. I need to change sample point from 70% to 80%
I have modify the parameters to meet the requirement.
But I found there's more error frame occur after modification.
bitTimes->nomRatePrescalar = 0xFU;
bitTimes->nomTimeSeg1 = 0x5U;
bitTimes->nomTimeSeg2 = 0x2U;
bitTimes->nomSynchJumpWidth = 0x0U;
bitTimes->dataRatePrescalar = 0x3U;
bitTimes->dataTimeSeg1 = 0x5U;
bitTimes->dataTimeSeg2 = 0x2U;
bitTimes->dataSynchJumpWidth = 0x0U;
bitTimes->nomRatePrescalar = 0xFU;
bitTimes->nomTimeSeg1 = 0x6U;
bitTimes->nomTimeSeg2 = 0x1U;
bitTimes->nomSynchJumpWidth = 0x0U;
bitTimes->dataRatePrescalar = 0x3U;
bitTimes->dataTimeSeg1 = 0x6U;
bitTimes->dataTimeSeg2 = 0x1U;
bitTimes->dataSynchJumpWidth = 0x0U;

Is there more parameters I need to modify or something else to do?
Thanks for your help.
Best Regards