A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
[FAQ] EVMK2GX: How to build, run and test the EMAC example on DSP core of K2G family processor
How to build, run and test the EMAC example from TI-RTOS PDK for the K2G family processors (EVMK2G, EVMK2GX, EVMK2GX, 66AK2G01, 66AK2G02, 66AK2G12 and K2GICE) on its DSP core?
After installing TI-RTOS SDK and CCS, we need to generate the Example projects for PDK(Processor Development Kit, folder present inside the "C:\ti", where all the driver APIS, Documentation, and Example code are present.),
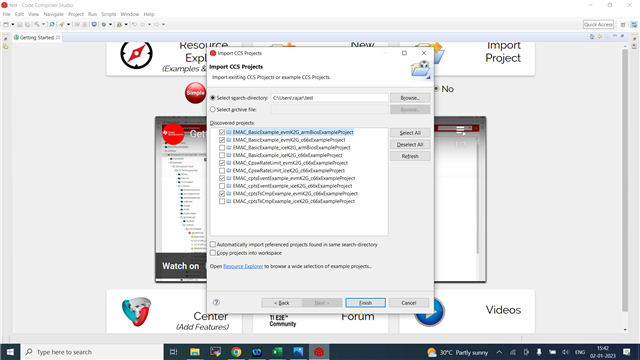
To Import the project, Go to File -> Import -> "CCS projects" in "C/C++" -> Browse "Select Search-directory". make sure to uncheck the "Copy Projects into Workspace" (This is to avoid compilation errors only If TI-RTOS SDK was installed in a different location than "C:\ti\").
we have the following DSP example projects
EMAC_BasicExample_evmK2G_c66xExampleProject
EMAC_BasicExample_iceK2G_c66xExampleProject
EMAC_CpswRateLimit_evmK2G_c66xExampleProject
EMAC_CpswRateLimit_iceK2G_c66xExampleProject
EMAC_cptsEventExample_evmK2G_c66xExampleProject
EMAC_cptsTsCmpExample_iceK2G_c66xExampleProject (Note: ICE - Industrial Communications Engine, is an extended module with bulk features added compared to evmK2G).
Do not open ARM and DSP examples at the same time, CCS will throw the "Project out-of-sync" error dialog.
Hardware connections,
Ethernet port connected from Router or Switch.
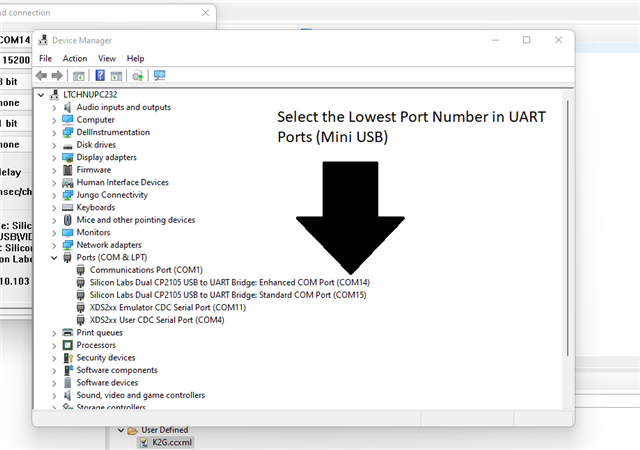
We can connect through Mini USB connecting through J1 (Another mini USB port (J3) used by Onboard Debug Emulator).
There will be two mini USB ports available for UART in the "Device Manager" section in "Windows OS" (CP2105 chipset, refer to device manager image for reference)
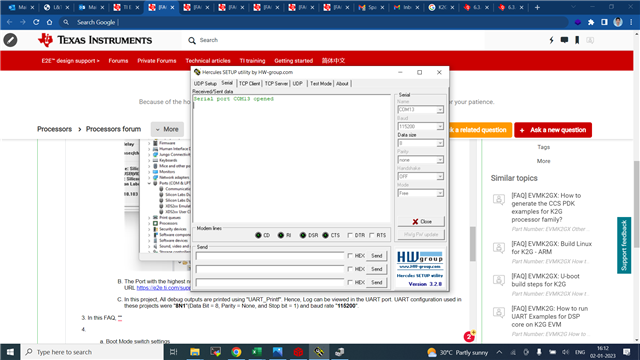
In this project, All debug outputs are printed using "UART_Printf". Hence, Log can be viewed in the UART port. UART configuration used in these projects were "8N1"(Data Bit = 8, Parity = None, and Stop bit = 1) and baud rate "115200".
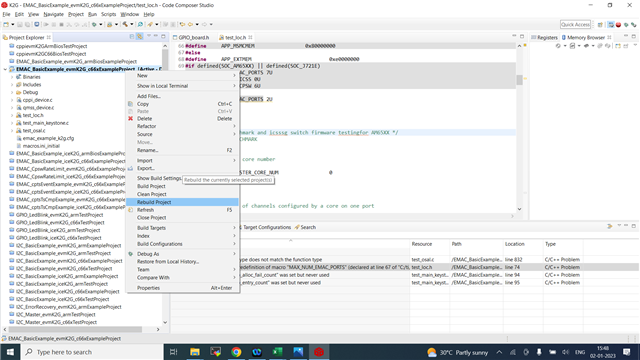
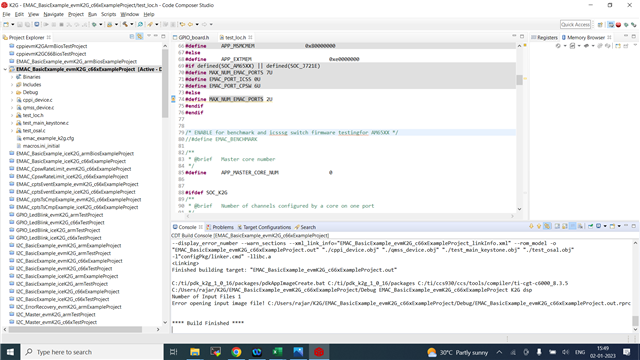
In this FAQ, "EMAC_BasicExample_evmK2G_c66xExampleProject" is built and run. This example deals with EMAC physical layer to send and receive packets.