Tool/software:
Hi, TI expert!
I have a development environment for am6234, with our own evaluation board.
I have two questions that need help to answer:
1.What is the frequency range of the input signal that ecap supports capturing?
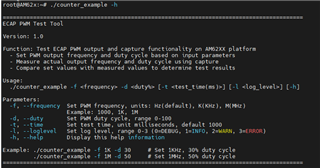
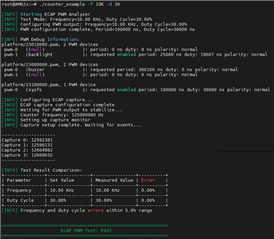
2.Is there a Linux user space testing program for ecap?
Using the following thread method, sometimes the period and duty cycle captured by ecap are inaccurate when the input signal frequency is high,
Regards,
Li