



Other Parts Discussed in Thread: TDA2
Hello,
We are transmitting data over MCAN2.
For the configuration of MCAN, we referred to the Gateway demo and MCAN EVM Loopback example from PDK.
Our current configuration sets the mode of MCAN to CAN-FD with nominal bit rate of 1 Mbps.
We wish to change this to classic CAN operating at 500 kbps.
First, we simply tested the following change, but it did not work out.

In the second attempt, we configured the following values, but these changes are also not working.
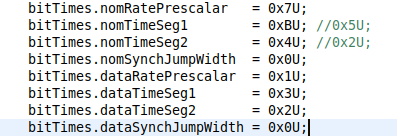
Are these bit timings correct? Do we need to make any other changes to the MCAN configuration?
Thank you.

