Other Parts Discussed in Thread: IWR6843,
Hi there,
We are developing a project based on IWR6843ISK. The aim is simply measuring the range between a moving object and the radar device. However, the working condition is somehow special compared to those common ones. Let's say the object is rotating extraordinarily fast at around 800rpm and the shape of it is quite thin (the width around 30cm) causing the time interval during which the shortest range between the object and the radar can be measured is shorter than 1ms (around 0.7ms according to the calculation). Every single frame should last less than this time interval so that every time the object sweeps across the radar, the measurement can be carried out at least once. Other radar data processing procedures like doppler or aoa estimation are not necessary. Is it ever possible to do such a fast measurement using IWR6843? Or any advice regarding the description above?

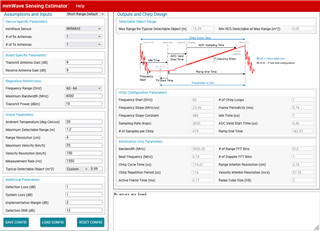
This is the result using mmWaveSensingEstimator.
thx
Shen