Other Parts Discussed in Thread: DRV5056
Hi,
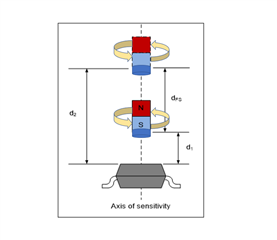
I would like to know will the sensor transmit constant output while the magnet is rotating at d1 and d2 distance? (as shown in below figure)
Will there be any added error in output voltage? Are there any constraints during magnet rotation for the sensor IC?