Other Parts Discussed in Thread: PGA460, ENERGIA
Hi there,
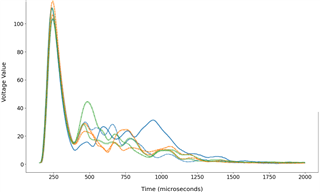
We are investigating ultrasound attenuation through various devices. We've found that due to the short distance over which we are transferring the pulses, there is some capacitance between the transmission and receive lines in bi-static mode, and we are therefore seeing a spike in signal at the very start of the waveform that is obscuring the signal. From our understanding, this shouldn't be there, and when looking at an oscilloscope attached to a transducer, we don't see the spike. See the below figure for an example of this spike:
To overcome this, we have purchased another PGA460 board to separate the transmission of the ultrasound pulse from the receiving so that we eradicate the capacitance issue. However, we also require the high resolution data that is available from selecting DSP - LP Filter on Graph Mode on the data monitor page.
This doesn't seem easily available when using UART and working from the BusDemo Energia sketches. I've seen some mention of using SPI to get the digitised ADC signal and then doing our own DSP, but I'm not particularly electronically savvy and was just wondering if we could get some guidance on how to get high-resolution ADC waveforms using one PGA460 board to transmit the signal and one PGA460 board to receive the signal.
Thank you for any help you can provide 
Jack