Other Parts Discussed in Thread: TMAG5110, TMAG5328,
Hello Community,
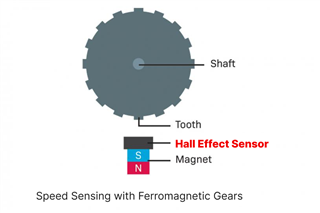
For shaft speed sensing, we want to avoid the installation of magnets/magnetic rings on the rotating shaft & want to leverage a disk with ferrous interrupters such that the following configuration is achieved.
We are looking for a Hall Effect switch for shaft speed sensing with the following requirements:
Method: Utilizing a disk with ferrous interrupters, not direct magnet attachment.
Air Gap: At least 6mm between the sensor and the gear teeth.
Teeth Count: Up to 12 gear teeth on the disk.
Speed: Maximum shaft speed is 6000 RPM.
Distance to MCU: The sensor will be 4m away from the MCU, in an industrial environment.
Output: Compatible with Quadrature Encoder Interface (QEI) on MCU.
Kindly suggest to us:
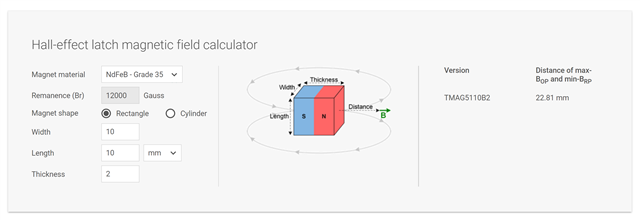
- Design resources, application notes or steps for selecting appropriate magent for back-biasing the hall effect sensor.
- A suitable switch from TI Portfolio for this application
Looking forward to your guidance & your expert suggestions for our use case.
Regards.