Hi,
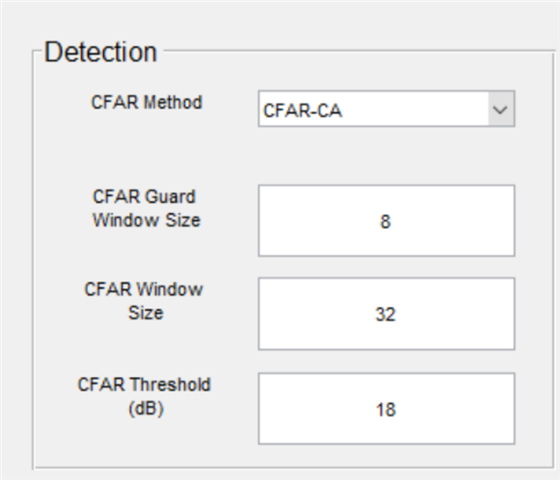
I have found some information in the mmWave Studio application in regards to the number of guard cells, as well as the threshold. Can you please explain what the CFAR window size is? Would this be the number of training cells, one-sided or two-sided? Also in the attached image you can see what I am referring to. In the image it specifies CA-CFAR. would this mean that the following c script from sdk, mmwavelib_cfarca.c, is used for noise estimation?
I attempted using the MATLAB CFAR-CA function but it gave me different results form mmWave Studio so I would like to understand the difference.
Thank you in advance for taking the time to response.