Other Parts Discussed in Thread: LDC1614EVM
hello.
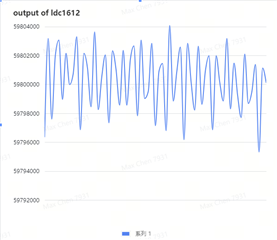
I would like to ask a few questions about the output value of the LDC1612 sensor.
1. When I keep the measuring object and the coil unchanged, the output value of the sensor fluctuates repeatedly within a range, and the fluctuation seems to have certain regularity, not like random noise. What is the reason for the fluctuation? Are there any rules?
2. Use the LDC1612 to measure a moving metal plane and make sure the coil stays above the plane.
(1) What is the difference between measuring in a static state and in a moving state?
(2) If the inductance value of an object is measured in a static state, what is the meaning of the value obtained by measuring a moving object?
looking forward to your answer.