Other Parts Discussed in Thread: TMAG5170, TMAG5273, TMAG5173-Q1
I would like to ask about calculations for specific case. I cannot find answer according to datasheet nor "TMAG5170 - 2D Angle Error Calculator".
My aplication is angle sensor for automotive. Temperature range -40:85degC. Take the parameters:
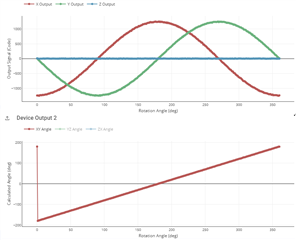
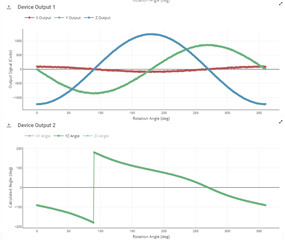
Bx,By peak: 24mT
Input range: 25mT (PTMAG5173A1QDBVRQ1)
CONV_AVG: 011 (8 samples)
Rotation speed: 0.85 Hz
Sampling mode: XYZZYX
X,Y Offset correction: OFF
Channel Gain Attenuation: OFF
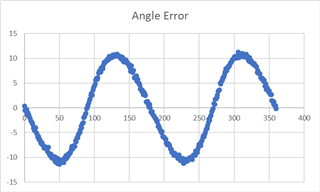
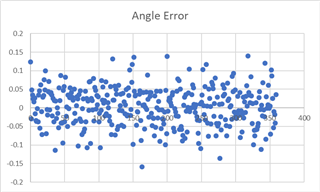
What is the worst-case output angle error in temperature range -40:85degC?