Other Parts Discussed in Thread: AWR2944
Hi,
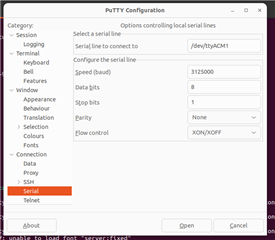
We are not able to set non-standard baud rate 3125000 used in AWR2944 "High End Corner Radar" Lab example to read serial data in Linux. However, We are able to set it in Windows environment.
$ stty -F /dev/ttyACM1 3125000 // do not work with customized baud rate
stty: invalid argument ‘3125000’
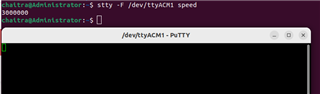
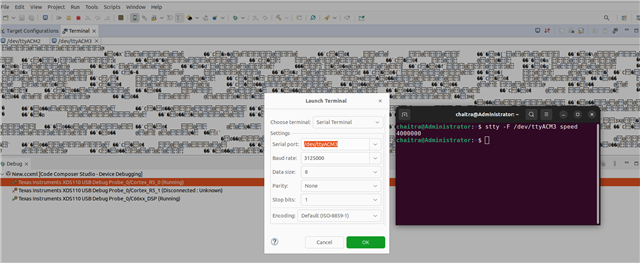
$ stty -F /dev/ttyACM1 speed // Able to set standard baud rate
3500000
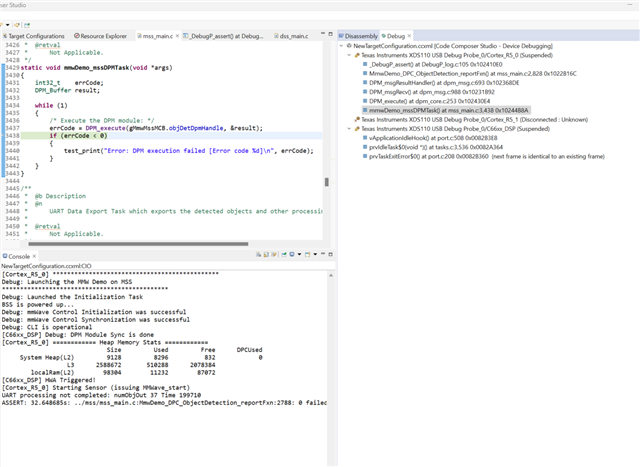
We need to read the serial data using AWR2944 in Linux. So, do you have a working tutorial/example that shows how this non standard baud rate can be enabled in Linux environment?
Thanks