Hi
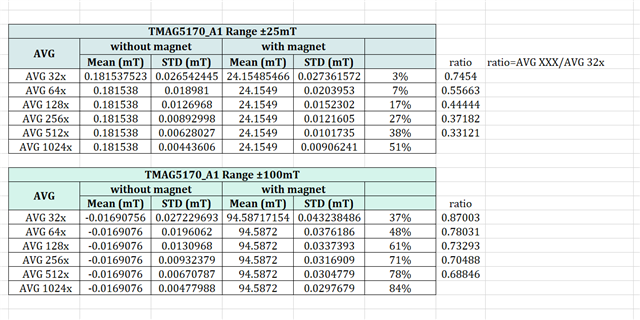
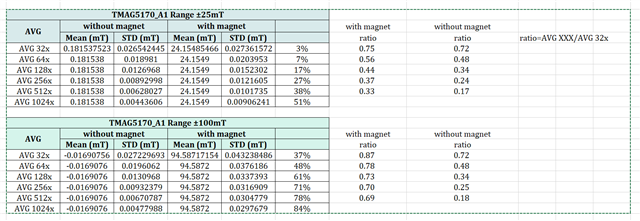
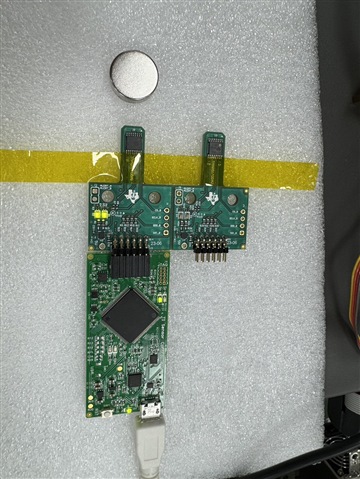
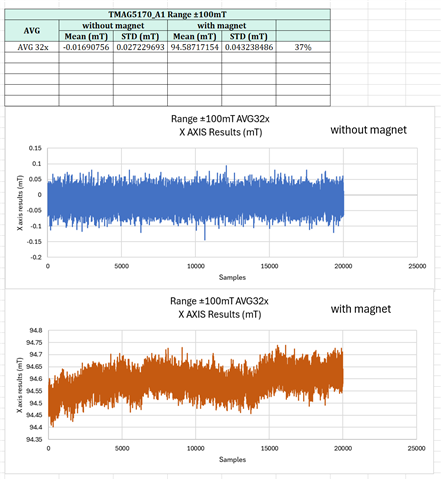
I found that when measuring TMAG5170 samples, the noise increases as the external magnetic field gets larger.
I have no idea why???
Can anyone help me?
thank you
Hi
I found that when measuring TMAG5170 samples, the noise increases as the external magnetic field gets larger.
I have no idea why???
Can anyone help me?
thank you